ŠOLSKI CENTER CELJE SREDNJA ŠOLA ZA STROJNIŠTVO, MEHATRONIKO IN MEDIJE RAZISKOVALNA NALOGA KOLABORATIVNO PRIJEMALO
|
|
|
- Silvo Perko
- pred 2 leti
- Pregledov:
Transkripcija
1 ŠOLSKI CENTER CELJE SREDNJA ŠOLA ZA STROJNIŠTVO, MEHATRONIKO IN MEDIJE RAZISKOVALNA NALOGA KOLABORATIVNO PRIJEMALO Avtorji: Klemen ZUPANEK, M-4. c Jan ČINŽAR, M-4. c Tadej HRVATIN, M-4. c Mentor: mag. Matej VEBER, univ. dipl. inž. Celje, januar 2020
2
3 POVZETEK V današnjem času je uporaba robotov po svetu bolj razširjena kot pred 20 leti. Uporaba industrijskih robotov v zadnjih letih raste v skladu z razvojem tehnologij in je nepogrešljiva tehnologija v industrijskih procesih. V zadnjih letih se uveljavljajo kolaborativni roboti. Njihov trg raste 40 % letno. Kolaborativni roboti so zaradi vgrajene tehnologije varnejši, zato za delovanje ne potrebujejo robotske celice in ne zavzamejo veliko prostora. Zasnovani so tako, da sodelujejo s človekom. So lažji in fleksibilnejši. Za takšnega robota je potrebno kolaborativno prijemalo, za raziskavo katerega izdelavo smo se odločili. V raziskovalni nalogi je predstavljeno kolaborativno prijemalo, njegov način delovanja, vse komponente, ki jih vsebuje, način izdelave, problematika, s katero smo se srečevali ter ideje za nadaljnji razvoj. Idejo za izdelavo prijemala smo dobili pri podjetju ETRA, d. o. o., ob njihovi predstavitvi na Šolskem centru Celje.. Ključne besede: Kolaborativni robot, koloborativno prijemalo, senzorji, 3d tisk.
4 SUMMARY Nowdays, the use of robots around the world is more widespreaded than 20 years ago. The use of industrial robots in recent years is growing according to the development of technologies and it is an indispensable technology in industrial processes. In recent years, the colaborative robots are enforcing. Their market grows 40% annually. As a result of the built-in technology, colloaborative robots safer, they do not require robotic cells and do not take much space. They are designed to collaborate with a man. They are lighter and more flexible. For such a robot it is necessary to have a colaborative gripper, which we decided to make. The research task is presented with a colaborative gripper, its mode of action, all components contained, the method of manufacture, the problem with which we meet and ideas for further development. The idea for making gripper was obtained from the company ETRA, D. O. O, on their presentation at the school centre Celje. Key words: Collaborative robot, collaborative gripper, sensors, 3D printing.
5 KAZALO VSEBINE 1.1 KAJ JE ROBOT Razlika med običajnim industrijskim in kolaborativnim robotom Opis kolaborativnega prijemala Pregled že obstoječih prijemal Komunikacija med robotom in prijemalom PROBLEMATIKA HIPOTEZE 7 2 OSNOVNI KONCEPT ZASNOVA PRIJEMALA ZASNOVA DELOVANJA PRIJEMALA D MODELIRANJE IN TISKANJE IZBIRA MATERIALA ZA 3D TISKANJE 13 3 RAZISKOVANJE PREIZKUŠANJE SENZORJEV PREIZKUŠANJE SERVOMOTORJA IZBIRA MIKROKRMILNIKA OPIS MIKROKRMILNIKA ARDUINO UNO REV IZBIRA NAPAJANJA SISTEMA ARDUINO IN MOTORJA Napajanje med testiranjem Napajanje na robotu 18 4 SESTAVLJANJE VEZJE OHIŠJE PRIJEMALA PREMIKANJE PRIJEMALNIH ROČIC KOVINSKI VLOŽKI 21 5 PROGRAMIRANJE PRIMER PROGRAMA TESTIRANJE PRIJEMALA VREDNOTENJE HIPOTEZ MOŽNOSTI IZBOLJŠAV 25 6 ZAKLJUČEK 26 7 ZAHVALA VIRI IN LITERATURA 28
6 KAZALO SLIK Slika 1: Robotski mehanizem Kuka KR6 R700 sixx 1 Slika 2: Kolaborativni robot Fanuc 2 Slika 3: Kolaborativni robot Yaskawa 2 Slika 4: Kolaborativni robot Franka Emika 3 Slika 5: Kolaborativni robot Universal Robots UR3 3 Slika 6: Električno kolaborativno prijemalo Schunk 4 Slika 7: Vakuumsko prijemalo Schmalz 5 Slika 8: Pnevmatska prijemala Zimmer 5 Slika 9: Prijemala Robotiq 6 Slika 10: Prijemalo OnRobot 6 Slika 11: Osnovna skica oblike prijemala 8 Slika 12: Zaščitna folija z mehurčki 9 Slika 13: Prijemalo 9 Slika 14: Prerez prijemala med razvojem in položaj 10 Slika 15: Skica delovanja prijemalk 11 Slika 16:.SLT format prirobnice primerne za 3D tisk 12 Slika 17: Pokrov v.stl formatu 12 Slika 18: Prijemlke v.stl formatu 13 Slika 19: IR temperaturni senzor MLX Slika 20: Vezava senzorja in motorja pri raziskovanju in testiranju 15 Slika 21: Senzor za merjenje sile na dotik 15 Slika 22: Servomotor 16 Slika 23: Mikrokrmilnik Arduino UNO REV3 17 Slika 24: Pretvornik napetosti iz 24 V na 9 V 18 Slika 25: Vezava senzorja za merjenje sile na dotik 19 Slika 26: Vezava IR senzorja MLX Slika 27: Primer programa med razvijanjem 22 Slika 28: Prijemalo na robotu med testiranjem 23 KAZALO TABEL Tabela 1: Ovrednotenje hipotez in razlaga potrditve oziroma delne potrditve 24

7 1 UVOD 1.1 KAJ JE ROBOT Beseda robot pomeni v češčini obvezno delo oziroma suženjstvo, zato si lahko predstavljamo, da je robot namenjen služenju ljudem. Preprosto si lahko robota predstavljamo kot kup železa, ki s pomočjo elektronike in človekovega znanja postane nepogrešljiv člen v vsakem proizvodnem procesu. Robot je s tehničnega vidika sestavljen iz treh glavnih delov: mehanskega dela (motorji, zavore, segmenti), informacijskega dela (krmilnik, računalnik, sistem vodenja), senzorjev (senzor sile, pospeškov, hitrosti pomika, strojni vid ). S programom, napisanim na računalnik, in naloženim na krmilnik robota, omogočimo napravi popolnoma avtonomno obratovanje. Ključni del za praktično uporabo robota pa je prijemalo, ki ga uporabljamo za prenašanje izdelkov, varjenje, rezkanje itd. Izbira prijemala je odvisna od namena uporabe. Poznamo pnevmatski, hidravlični in električni pogon prijemal, delimo pa jih tudi po načinu ustvarjanja sile, številu prstov in načinu odpiranja.vedno več pa je tudi kolaborativnih prijemal, katerega izdelave smo se lotili tudi mi. Slika 1: Robotski mehanizem Kuka KR6 R700 sixx (Vir: Osebni arhiv) Na sliki 1 je robotski mehanizem Kuka, ki smo ga namesto kolaborativnega robota uporabili v namen naše raziskave. 1


8 1.1.1 Razlika med običajnim industrijskim in kolaborativnim robotom Kolaborativni roboti ali koboti so roboti, ki so zasnovani za sodelovanje s človekom v nekem delovnem okolju, medtem ko so industrijski roboti zasnovani za avtonomno delovanje, varnost pa jim zagotovimo tako, da jih ločimo od človeka. Slika 2: Kolaborativni robot Fanuc Glavne značilnosti kobotov so: lahki materiali, iz katerih so zgrajeni, zaobljeni robovi, majhne hitrosti in sile pri delovanju ter veliko senzorjev, ki poskrbijo za varnost. Ker je kolaborativni robot lažji kot industrijski, ga je preprostejše prestaviti iz ene delovne naloge na drugo. Prav tako je preprostejše tudi programiranje prek zaslonov na dotik in ročno vodenje robota od točke do točke. Vsak robot, ki je sestavljen pri drugem izvajalcu, ima določene dele in komponente drugače postavljene ali drugače zasnovane. Kot na primer na sliki 2 vidimo kolaborativnega robota Fanuc, ki ima senzorje v bazi podstavku. Slika 3: Kolaborativni robot Yaskawa (Vir: (Vir: Gripper.png.aspx) 2


9 Slika 4: Kolaborativni robot Franka Emika -E2-80-9Erozmnozovat-E2-80-9C) Slika 5: Kolaborativni robot Universal Robots UR3 (Vir: (Vir: -E2-80-9Erozmnozovat-E2-80-9C) Na sliki 5 vidimo robota Universal Robots UR3. Podjetje Universal Robots je bil eden izmed prvih proizvajalcev kolaborativnih robotov in ima trenutno največji tržni delež v globalnem merilu. Trenutno so kolaborativni roboti zelo aktualni za industrijske procese. Naročniki kolaborativnih robotov se trenutno soočajo s težavo kot je npr. doseganje cikla, omenjeni roboti imajo namreč omejeno hitrost gibanja zaradi zagotavljanja kolaborativnosti. To rešujejo tako, da so roboti delno intergrirani v robotskih celicah, v tem primeru ne delujejo koloborativno, delno pa izven celice, kjer sodelujejo s človekom. V prihodnosti bo razvoj sledil smernicam industrije 4.0 in družbe

10 1.1.2 Opis kolaborativnega prijemala Kolaborativno prijemalo je posebno prijemalo, ki je izdelano v namen uporabe na kolaborativnem robotu. Zasnova je primerna temu, da pri rokovanju z robotom ali prijemalom ne more priti do kakršnekoli poškodbe oziroma je možnost za nastanek le-teh zelo majhna, po čemer se razlikujejo od ostalih prijemal. Na njih prav tako ni ostrih robov, na katerih bi se lahko poškodovali. Vgrajeni so različni senzorji (npr. za silo, temperaturo...), ki preprečujejo možnosti stiska upravljavca robota in kakršnokoli možnost za nastanek nesreče. Prijemalo lahko programiramo preko računalnika ali s pomočjo vodenja, tj. da primemo robota in ga vodimo od točke do točke. Robot si pot, kjer ga vodimo, zapomni, in ko zaključimo z vodenjem, samostojno opravlja pot, po kateri ga je upravljavec vodil. Predhodno lahko v programu določimo, s kakšno silo bo prijemalo prijelo izdelek, da ga ne bo stisnilo premočno ali premalo, ker obstaja možnost, da ga med transportom od točke do točke izgubi Določimo lahko tudi silo interakcije, pri kateri se ustavi Pregled že obstoječih prijemal Kolaborativni roboti in kolaborativna prijemala so se že zelo razširila po celotnem svetu. Na spletu smo našli že kar nekaj primerov različnih oblik in načinov delovanja teh prijemal. Vsako večje podjetje, ki izdeluje kolaborativne in ostale industrijske robote, ima svojo obliko kolaborativnega prijemala. Slika 6: Električno kolaborativno prijemalo Schunk (Vir: 800x500_c.jpg) 4


11 Največ različnih oblik smo zasledili pri proizvajalcu Schunk (slika 6). Prav tako pa so konkurenčna tudi prijemala drugih proizvajalcev. Slika 7: Vakuumsko prijemalo Schmalz (Vir: Ob raziskovanju smo spoznali tudi nam ne znana podjetja, med drugimi podjetje Schmalz (slika 7), ki proizvaja samo vakuumska prijemala. Slika 8: Pnevmatska prijemala Zimmer (Vir: auto_c69c a049d25d46ea55f27e406/mrkgreifer_produktabbildung_trans_small.png) Poznamo Zimmerjeva prijemala (slika 8), ki delujejo preko pnevmatskega sistema, Schunkova prijemala, ki so po večini električna, OnRobot (slika 10) in Robotiq (slika 9) pa ponujajo veliko 5

 Slika 10: Prijemalo OnRobot (Vir:https://onrobot.")
12 različnih pnevmatskih in vakuumskih prijemal. Vsako podjetje ima svojo obliko, način delovanja prijemala in varnostne sisteme. Slika 9: Prijemala Robotiq (Vir: Slika 10: Prijemalo OnRobot (Vir: 8xqhdM) 6
13 1.1.4 Komunikacija med robotom in prijemalom Za pravilno delovanje robota je potrebna pravilna komunikacija med njegovimi sestavnimi deli. Najpomembnejša je komunikacija med računalnikom in robotom, vendar pa ne smemo pozabiti tudi na komunikacijo med robotom in prijemalom. 1.2 PROBLEMATIKA Največji problem pri kolaborativnih prijemalih je narediti prijemalo, ki bo varno za človeka. Pojavi se vprašanje, s kakšno tehnologijo ga opremiti, da bo čim bolj varno. Problem se pojavi tudi pri zasnovi. Kako ga zasnovati, da se bodo vse komponente, ki so na njem, po večini skrile v ohišje prijemala in kako komponente razporediti v prijemalo, ki mora biti primerne velikosti. Vsebuje tudi zahtevne komponente, ki so dražje, zato je tudi cena višja. Prav tako je zahtevno vzpostaviti komunikacijo med robotom in prijemalom. Med kolaborativnim robotom in prijemalom, ki sta narejena za skupno sodelovanje, je preprosteje, saj imata že narejene priključke. Pri našem prijemalu, ki pa ni narejeno posebej za določen tip robota, pa je komunikacijo težje vzpostaviti. Vsako prijemalo ni prilagodljivo za vse robote, saj so narejena le za določene vrste. Problem se pojavi tudi pri zanesljivosti prijemala, saj lahko zaradi kakšne napake zataji. 1.3 HIPOTEZE Kolaborativno prijemalo je vsestransko uporabno za vse tipe robotov. Možno je izdelati cenovno ugodno kolaborativno prijemalo. Kolaborativno prijemalo ustreza varnostnim kriterijem. Zaznavanje človeških udov je možno z uporabo IR temperaturnega senzorja. Možno je izdelati in prilagajati prijemala glede na tip robota. 7

14 2 OSNOVNI KONCEPT Pred začetkom izdelave prijemala smo se spopadli z vprašanji, kot so: Kako bo prijemalo izgledalo? Kako bo delovalo? Na kakšen način bo prijemalo prijemalo izdelke? Najprej smo se med seboj posvetovali, na list papirja izrazili ideje in jih s profesorjem preučili. To snovanje idej je trajalo kar nekaj časa, saj smo vedno prišli do kakšne ideje, ki je prejšnjo nadgradila ali spremenila. Slika 11: Osnovna skica oblike prijemala (Vir: Osebni vir) 2.1 ZASNOVA PRIJEMALA Za izgled samega prijemala smo porabili kar nekaj časa, saj je moralo izgledati karseda sveže in posebno med konkurenco, ki že obstajajo na trgu. Za obliko nas je navdihnila folija z mehurčki za ščitenje izdelkov med transportom. Kot folija ščiti izdelke pred poškodbami, tako naše prijemalo ščiti uporabnika, ki z njim sodeluje. Tako smo preko prispodob o foliji predstavili kolaborativnost tega prijemala. Uporabniku daje oblika občutek varnosti, za še dodatno varnost pa poskrbijo senzorji. 8

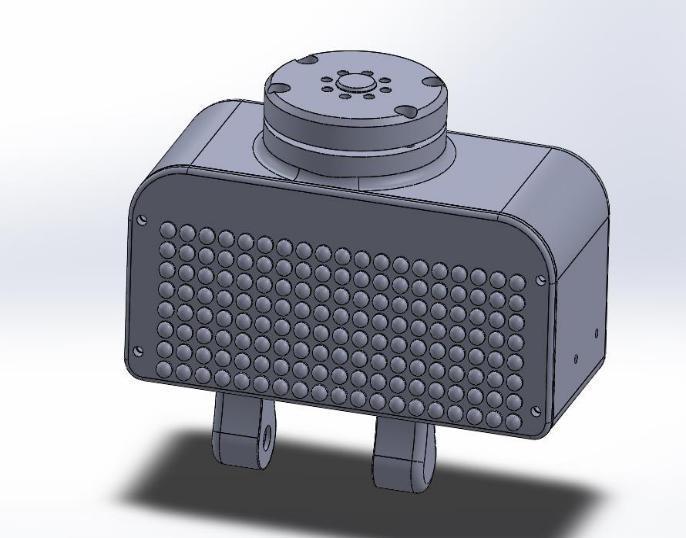
15 Slika 12: Zaščitna folija z mehurčki (Vir: b8d27136e95/f/o/folija_z_zra_nimi_blazinicami_trislojna_1.jpg) Slika 13: Prijemalo (Vir: Osebni arhiv) 9

16 Elektronika Arduino Motor IR senzor MLX90614 Senzor za merjenje sile Slika 14: prerez prijemala med razvojem in položaj komponent (Vir: Osebni arhiv) 2.2 ZASNOVA DELOVANJA PRIJEMALA Odločiti smo se morali, na kakšen princip bo prijemalo delovalo, s kakšnimi senzorji bo opremljeno in kako močno bo lahko stiskal izdelke. Za nastavitev sile smo se odločili, ko smo preverili vse parametre in način delovanja. Uporabili smo senzor za merjenje sile na dotik. Pri sistemu kako preprečiti stisk roke prijemala, smo porabili nekoliko več časa, saj sprva nismo vedeli, kako bi lahko to preprečili. Ker smo imeli cilj izdelati cenovno ugodno prijemalo, termalna kamera ni zadovoljevala tej naši zahtevi. Odločili smo se, da bomo uporabili IR senzor za zaznavanje spremembe temperature. Začeli smo iskati senzorje in preverjati parametre ter ugotovili, da bi bila najboljša izbira senzor MLX Po premišljeni izbiri smo se odločili za nakup in začeli testiranje. Ob vprašanju, kako bi prijemalu omogočili prijemanje izdelkov, se je porodila ideja, da bi ročice za prijemanje razpirali in zapirali s pomočjo zobniškega sistema. Idejo pa smo ovrgli, saj bi bilo 10

17 težko narediti takšen sistem majhen. V našem prijemalu smo zaradi drugih komponent, ki se še nahajajo znotraj ohišja, potrebovali majhen sistem. Prav tako pa so morali biti zobniki v nekem zaprtem prostoru. Druga ideja je bila, da bi premikanje omogočili z navojno gredjo, ki ne bi zavzela toliko prostora. Pojavil pa se je problem, kako z gredjo ustvariti gibanje, ki bi omogočalo prstom, da primejo izdelek. Prišli smo do ideje, da bo imela gred na eni strani levi navoj, na drugi strani pa desni. Tako se lahko ob vrtenju motorja prsta premikata v nasprotno smer. Slika 15: Skica delovanja prijemalk (Vir: Osebni vir) 2.3 3D MODELIRANJE IN TISKANJE Preden smo začeli 3D CAD modelirati v orodju SolidWorks, smo ideje skicirali na list papirja. Dogovorili smo se, da bomo prijemalo upravljali z robotom Kuka KR6 R700 sixx, Ki ni kolaborativni robot, ampak ker nimamo kolaborativnega robota, smo zadevo testirali na obstoječem. Pri izbranem robotu smo za vpetje prijemala potrebovali vmesni del, imenovan prirobnica. Izmerili smo njene dimenzije in jo zmodelirali v programu SolidWorks. Prirobnico smo iz formata.sldprt pretvorili v format.stl, primeren za 3D tisk. 11


18 Medtem ko smo prirobnico 3D tiskali, smo se začeli ukvarjati predvsem z izgledom našega ohišja prijemala, ki je moral zajemati dovolj prostora za vse vezje in imeti nekakšen nov ter svež videz. Poskrbeli smo tudi za prijemalke, ki bodo opravljale glavno vlogo pri rokovanju z izdelki, in naredili prostor za vse senzorje, ki bodo na njih. Slika 16:.SLT format prirobnice primerne za 3D tisk (Vir: Osebni arhiv) Slika 17: pokrov v.stl formatu (vir: osebni arhiv) 12


19 Slika 18: prijemalke v.stl formatu (vir: osebni arhiv) 2.4 IZBIRA MATERIALA ZA 3D TISKANJE Pri izbiri materiala za tiskanje vseh delov smo se po posvetu in priporočilu profesorja odločili za plastiko, saj je naše prijemalo le prototip in je le tako lahko naš projekt cenovno ugoden za izdelavo. Prirobnico smo pretvorili v prej omenjeno.stl obliko, ki je kompatibilna s 3D tiskalnikom. Material, iz katerega je bila natisnjena, je bila PLA plastika črne barve. Prirobnici smo po končanem tiskanju odstranili odvečen material in jo vpeli na robota. 13

20 3 RAZISKOVANJE 3.1 PREIZKUŠANJE SENZORJEV Pred naročilom smo pregledali, ali parametri obeh senzorjev zadostujejo našim kriterijem. Za maksimalno zaščito upravljavca robota s senzorji smo pred njihovo vgradnjo preizkusili vsak senzor, ki smo ga potrebovali, posebej. Preizkusili smo jih s pomočjo testne ploščice in programske opreme Arduino UNO. Za izdelavo kolaborativnega prijemala smo uporabili IR senzor za merjenje temperature MLX90614, s katerim zaznavamo spremembo temperature. S tem smo preprečili, da bi prijemalo stisnilo človeško roko. Slika 19: IR temperaturni senzor MLX (Vir: Osebni arhiv) Slika 14 prikazuje testno vezje, v katerega je vključen IR temperaturni senzor, upore, ki smo jih potrebovali za delovanje senzorja, led diodo, ki se je zasvetila, ko je senzor zaznal temperaturo, večjo od 32, in testni servomotor, ki je priložen v kompletu z Arduinom in smo ga uporabili, da smo videli, če program deluje ko lučka zasveti, se mora motor ustaviti. To je bil prvi cilj našega programiranja. Na sliki je še mikrokrmilnik Arduino, ki smo ga uporabljali za krmiljenje prijemala. 14
 Uporabili smo tudi senzor za merjenje sile na dotik.")

21 Slika 20: Vezava senzorja in motorja pri raziskovanju in testiranju (Vir: Osebni arhiv) Uporabili smo tudi senzor za merjenje sile na dotik. Z njim smo hoteli vedeti, s kakšno silo bi prijemalo stisnilo izdelek. V programu smo senzorju nastavili silo, s katero sme prijeti izdelek. Slika 21: Senzor za merjenje sile na dotik (Vir: Osebni arhiv) 15

22 3.2 PREIZKUŠANJE SERVOMOTORJA Za premikanje prijemalnih ročic smo se odločili, da bomo uporabili servomotor. Sprva smo preizkusili motor, ki smo ga poleg Arduina imeli v šoli. Da je motor ustrezno deloval, smo ga morali preurediti. Iz 180 stopinjskega motorja smo naredili 360 stopinjskega. To smo naredili tako, da smo motor razstavili in na zobnikih odstranili zoba, ki sta mu preprečevala vrtenje za 360 stopinj. Na motorju smo morali drugače spajkati tudi žice, ki so potrebne za povezovanje z Arduinom. Ko smo to naredili, smo motor sestavili nazaj, ga preizkusili z Arduino UNO programsko opremo, nato pa zraven priključili še oba senzorja. Da bi vse komponente delovale skupaj, smo morali združiti programe, ki smo jih pred tem napisali za vsako komponento posebej. Program smo nato prenesli na Arduino in preizkusili, ali celotno vezje izpolnjuje naše zahteve, ki so potrebne za dostojno delovanje našega kolaborativnega prijemala. Ko je celoten sistem deloval, je čakal na vgradnjo v ohišje prijemala. Slika 22: Servomotor (Vir: IZBIRA MIKROKRMILNIKA Eno izmed ključnih vprašanj v raziskovalni nalogi je bilo, kateri mikrokrmilnik bomo uporabili za našo kolaborativno prijemalo. Primerjali smo mikrokrmilnik Raspberry-Pi in Arduinov mikrokrmilnik UNO. Na koncu smo se odločili za Arduinov sistem, s katerim smo se seznanili že v nižjih letnikih šolanja, in sicer mikrokrmilnik Arduino UNO REV3. 16

23 Slika 23: Mikrokrmilnik Arduino UNO REV3 (Vir: 500x500.png) 3.4 OPIS MIKROKRMILNIKA ARDUINO UNO REV3 Opis mikrokrmilnika: ATmega328P 8-bitni mikročip, 5 V delovna napetost, 7 V 20 V vhodne napetosti, priporočeno od 6 V 12 V, 14 digitalnih I/O izhodov in 6 analognih Arduino UNO ima tudi USB vhod, ki ima dve funkciji: napajanje sistema in nalaganje programov, napisanih v računalniškem programu Arduino IDE (Integrated Development Environment). Programska oprema je sestavljena iz standardnega programskega jezika, prevajalnika in zagonskega nalagalnika. 3.5 IZBIRA NAPAJANJA SISTEMA ARDUINO IN MOTORJA Napajanje med testiranjem Za napajanje smo uporabili 9 V baterijo za enkratno uporabo, ki jo je mogoče po izpraznitvi preprosto zamenjati. Baterija ima dva priključka manjši okrogli del je moški (+), večji oglati del pa ženski ( ). Med slabosti tovrstne postavitve se šteje možnost napake ob priklopu in posledično večja možnost kratkega stika, zaradi česar se lahko baterija izprazni, pregreje ali celo vžge. Zato 17

24 smo morali za preprosto napajanje Arduina z baterijo narediti poseben priključek connector. Napetost, ki je prišla na Arduino, smo nato speljali do vseh komponent sistema in jim zagotovili nemoteno delovanje Napajanje na robotu Na robotu smo za napajanje na Arduinu in motorju poskrbeli preko robotskega krmilnika, kjer smo vzeli 24 V. To napetost smo peljali do nastavljivega DC-DC pretvornika. Uporabili smo pretvornik z izhodno napetostjo 9 V za napajanje Arduina in prav tako 9 V za napajanje servomotorja. Slika 24: Pretvornik napetosti iz 24 V na 9 V (Vir: Osebni arhiv) 18

25 4 SESTAVLJANJE Sestavljanja smo se lotili, ko smo imeli narejene vse dele prijemala. Da so se vsi deli natisnili, pa je preteklo kar nekaj časa. Pri sestavi nismo hiteli, saj smo bili pozorni, da nismo pozabili na kakšen sestavni del. To bi namreč pomenilo dodatno izgubo časa ali dodatne težave v ključnih trenutkih preizkušanja prijemala. Samo sestavljanje ni bilo obsežno, saj smo prijemalo zmodelirali tako, da je imelo čim manj sestavnih delov. Treba je bilo le pritrditi prirobnico na robota, prijemalo na prirobnico, še prej pa vstaviti vse komponente v prijemalo in ga pokriti s pokrovom. 4.1 VEZJE Za pravilno delovanje temperaturnega senzorja smo le-tega morali nastaviti v programu, ga pravilno povezati na Arduino in na testno ploščo z dvema 4,7 kω uporoma in 0,1 µf velikim kondenzatorjem. Za vezavo, v kateri je bil senzor sile na dotik, smo potrebovali samo en 10 kω upor. Senzorjema smo nato v vezje dodali še servomotor. Ko je vezje delovalo, smo ga spajkali skupaj. Drugače bi bilo v ohišje prijemala nemogoče poleg Arduina vstaviti še testno ploščo, saj bi zasedla preveč prostora. Prav tako pa tudi vezava ne bi pravilno delovala, če ne bi komponent in žic med seboj spajkali. V nasprotnem primeru bi lahko iz plošče padla kakšna žica, ali bi prišlo do slabih stikov in prijemalo ne bi več delovalo ali pa bi celo prišlo do kratkega stika in bi lahko uničilo kakšno komponento v vezju ali celo celotno vezje. Žic vezja pa nismo mogli spajkati skupaj s senzorjema pred sestavljanjem, saj bi bila tako vgradnja senzorjev močno otežena. Tako smo žice najprej pripeljali do odprtin za senzorje in nanje priključili senzorje. Senzorje smo nato vstavili v odprtine, namenjene za njih, in nadaljevali s sestavljanjem. Slika 25: Vezava senzorja za merjenje sile na dotik (Vir: 19


26 Slika 26: Vezava IR senzorja MLX90614 (Vir: OHIŠJE PRIJEMALA Ohišje prijemala smo zasnovali tako, da je čim bolj varen za sodelovanje s človekom. Na začetku smo imeli kar nekaj težav s tem, kako bi prijemalo izgledalo, saj je na trgu že kar nekaj podobnih. Pri modeliranju smo morali paziti predvsem na to, da noben rob ni smel biti oster, kar nam je oviralo delo. Ohišje je glavna komponenta celotnega prijemala, saj se v njem skrivajo celotno vezje, napajanje in pogon. Med risanjem smo nanj naredili še luknji, ki sta potrebni za preprosto dostopanje do vhoda za napajanje in za nalaganje programa na Arduino. Pri konstruiranju pa smo morali paziti še, da bodo vse te komponente preproste za vgradnjo in da bo za vsako posebej dovolj prostora. 4.3 PREMIKANJE PRIJEMALNIH ROČIC Največja težava je nastopila pri premikanju ročic, in sicer kako jih bomo premikali. Veliko idej je bilo neizvedljivih, ker bi nam pri tem odvzele preveč prostora, ki je nujen za ostale komponente. Najboljša možnost je bila zobniško gonilo. Odločili smo se, da ga narišemo sami in stiskamo s pomočjo 3D tiskalnika. Pri njegovi namestitvi smo morali paziti, da smo zobnike namestili natančno, da so se med seboj ujemali in premikali ročice v pravo smer. Oblika ročic je bila stvar trenutnega navdiha, saj smo veliko podobnih videli že na drugih prijemalih. 20
27 4.4 KOVINSKI VLOŽKI Pri snovanju prijemala smo prišli do problema, kako vse komponente spraviti v njega. Na ohišju smo naredili pokrov, ki se lahko odpira v primeru kakšnih nevšečnosti. Ob tem pa naleteli še na en problem, in sicer kako pritrditi pokrov na ohišje, ne da bi med samim obratovanjem prijemala odpadel. Sprva smo mislili, da bo dovolj, če v ohišje zmodeliramo navoje, a smo ugotovili, da bi bili le-ti prešibki, da bi zdržali večkratno pritrjevanje vijakov, ki bi držali pokrov na samo ohišje. Iskali smo optimalno rešitev in jo tudi našli v obliki kovinskih navojnih vložkov velikosti 5 mm. Za sam vložek smo morali v prijemalo narediti le nekaj izvrtin velikosti 8 mm. 21
28 5 PROGRAMIRANJE Da bi prijemalo delovalo, je bilo potrebno še ključno dejanje. Na izbrani mikrokrmilnik smo morali izdelati in prenesti še programski del tega projekta. Pred programiranjem smo morali določiti, na kakšen način bo program v prijemalu deloval. Za programiranje smo uporabili programsko opremo Arduino UNO, v katero smo najprej napisali ustrezne spremenljivke in knjižnice, ki jih je program za ustrezno delovanje potreboval. Knjižnice smo morali predhodno naložiti v program. Nato smo napisali programe za vsako komponento, ki je bila potrebna za delovanje celotnega prijemala. Vse posamezne programe smo združili v eno programsko celoto, da so vse komponente delovale kot eno. Pri programiranju smo si pomagali s spletno stranjo»arduino home«in s posameznimi njihovimi primeri. 5.1 PRIMER PROGRAMA V nadaljevanju je primer programa, ki smo ga uporabili med razvijanjem končnega programa. Slika 27: Primer programa med razvijanjem (Vir: Osebni arhiv) 22

29 5.2 TESTIRANJE PRIJEMALA Po končanem programiranju prijemala je prišlo na vrsto še zadnje dejanje testiranje. Prijemalo smo prvič namestili na robota v šoli, nanj naložili program in ga preizkusili. Stvari, ki niso delovale po naših željah, smo popravili ali dodelali. Po nekaj popravkih smo ga ponovno preizkusili in bili z njegovim delovanjem zadovoljni. Ko je delovalo po naših željah, smo lahko začeli vrednotiti hipoteze, ki smo si jih zadali pred začetkom našega dela. Večina od teh hipotez je bila potrjena. Slika 28: Prijemalo na robotu med testiranjem (Vir: osebni arhiv) 23



30 5.3 VREDNOTENJE HIPOTEZ Tabela 1: Ovrednotenje hipotez in razlaga potrditve oziroma delne potrditve HIPOTEZA POTRDIMO/OVR POJASNILO ŽEMO Kolaborativno prijemalo je Potrdimo lahko uporabo prijemala na vsestransko uporabno za vse Kukinem KR6 R700 sixx robotu, ki ni tipe robotov. kolaborativni robot. Prilagodimo lahko prirobnico glede na tip robota. Problem pa lahko predstavla tudi komunikacija in priključki (napajanje, signali, medijzrak ali elektrika) Možno je izdelati cenovno Vse sestavne dele, vključno s tiskanjem ugodno kolaborativno in nabavo elektronike, smo uspeli prijemalo. pridobiti pod 200. Kolaborativno prijemalo ustreza varnostnim kriterijem. Senzor zazna človekov ud pravočasno in prijemalo se ustavi, hitrosti in sile so nadzorovane. Zaznavanje človeških udov je možno z uporabo IR temperaturnega senzorja. IR temperaturni senzor ima dovolj veliko območje zaznavanja temperature in prijemalo se pravočasno ustavi. Možnoje izdelati in Da, s spremembo prirobnice in prilagajati prijemala glede na programa smo uporabili prijemalo na tip robota. drugem robotu. 24
31 5.4 MOŽNOSTI IZBOLJŠAV Ob zaključku raziskovalne naloge smo razmišljali še o možnostih izboljšave. Da bi bilo prijemalo še varnejše, bi lahko nanj namestili še več senzorjev, ki bi zaznali človekovo prisotnost v njegovi bližini. Prijemalo bi se v takšnem primeru takoj zaustavilo. V ohišje bi lahko vgradili zaslon, na katerem bi se izpisovali želeni podatki. Lahko bi si olajšali delo in bi namesto popravljanja napak v programu le-te odpravili na vstavljenem zaslonu na dotik. Nanj bi lahko namestili podlago, na katero bi delavec položil roke in ročno upravljal z njim. Prijemalo bi si pri tem zapomnilo točke, ki bi jih delavec označil. Ko bi pot zaključil, bi se na zaslonu prikazala celotna pot, ki jo je naredilo. Če bi prišlo do kakšne okvare, bi lahko prijemalo na zaslonu samo izpisalo, kateri del se je pokvaril in ga je treba zamenjati. Izboljšali bi lahko komunikacijo med robotom in prijemalom, da bi delovala kot eno. Prijemalke bi lahko naredili tako, da bi bile hitro snemljive in zamenljive z vakuumskim prijemalom za prenašanje večjih izdelkov. Lahko bi imelo tudi priključke za pogon črpalk ali motorjev in lahko bi naredili vodoodporno prijemalo po standardu IP67. To pomeni popolno zaščito pred trdimi delci in potopitvijo prijemala v globino med 15 cm in 100 cm. 25
32 6 ZAKLJUČEK S pomočjo hipotez, ki smo si jih zastavili, in različnih raziskovalnih metod smo našo raziskovalno nalogo pripeljali do konca. Pri izdelovanju izdelka je vsak člani ekipe prispeval svoj delež. Skozi celoten proces izdelovanja prijemala smo se naučili veliko na področjih robotike na splošno, 3D CAD modeliranja, senzorike, elektronike in programiranja. To znanje nam bo koristilo pri nadaljnjem šolanju in kasneje pri zaposlitvi. Ob začetku naše raziskovalne naloge smo vse vzeli prelahko. Med delom pa smo naleteli na mnogo problemov, ki so se po stopnji zahtevnosti razlikovali in smo morali, če smo hoteli pripeljati našo raziskavo do konca, resno lotiti dela. Ko nam je to uspelo, so bila naša pričakovanja izpolnjena. 26
33 7 ZAHVALA Zahvalili bi se mentorju mag. Mateju Vebru, univ. dipl. inž., za vso pomoč in podporo v ključnih trenutkih, ko sami nismo več videli rešitve. Zahvaljujemo se tudi gospe Tadeji Kolman, prof., za slovnični pregled in podjetju ETRA, d. o. o., za idejo, ki smo jo dobili na predstavitvi na šoli. 27
34 8. VIRI IN LITERATURA [1] Fanuc (online). (Citirano ). Dostopno na naslovu: [2] Force sensitive resistor (online). (Citirano ). Dostopno na naslovu: [3] Infrared temperature sensor MLX90614 (online). (Citirano ). Dostopno na naslovu: [4] Kolaborativni robot (online). (Citirano ). Dostopno na naslovu: [6] Motor driver l298n (online). (Citirano ). Dostopno na naslovu: [7] Robot (online). (Citirano ). Dostopno na naslovu: [8] Schunk (online). (Citirano ). Dostopno na naslovu: 28
Mestna občina Celje Komisija Mladi za Celje POLICA ZA HLADILNIK Z VGRAJENO TEHTNICO RAZISKOVALNA NALOGA (Fizika, Elektronika) Avtorja: Martin Malinger
 Avtorja: Martin Malinger") Mestna občina Celje Komisija Mladi za Celje POLICA ZA HLADILNIK Z VGRAJENO TEHTNICO RAZISKOVALNA NALOGA (Fizika, Elektronika) Avtorja: Martin Malinger (9.a), Luka Segečić (9.a) Mentorica: Nina Miklavžina,
Mestna občina Celje Komisija Mladi za Celje POLICA ZA HLADILNIK Z VGRAJENO TEHTNICO RAZISKOVALNA NALOGA (Fizika, Elektronika) Avtorja: Martin Malinger (9.a), Luka Segečić (9.a) Mentorica: Nina Miklavžina,
Microsoft Word - CNC obdelava kazalo vsebine.doc
 ŠOLSKI CENTER NOVO MESTO VIŠJA STROKOVNA ŠOLA STROJNIŠTVO DIPLOMSKA NALOGA Novo mesto, april 2008 Ime in priimek študenta ŠOLSKI CENTER NOVO MESTO VIŠJA STROKOVNA ŠOLA STROJNIŠTVO DIPLOMSKA NALOGA Novo
ŠOLSKI CENTER NOVO MESTO VIŠJA STROKOVNA ŠOLA STROJNIŠTVO DIPLOMSKA NALOGA Novo mesto, april 2008 Ime in priimek študenta ŠOLSKI CENTER NOVO MESTO VIŠJA STROKOVNA ŠOLA STROJNIŠTVO DIPLOMSKA NALOGA Novo
Povzetek
 Šolski center Celje Srednja šola za strojništvo, mehatroniko in medije SAMODEJNI VZDRŽEVALEC RASTLIN RAZISKOVALNA NALOGA Avtor: Nino Kuzma, M-4. c Mentorja: Matej Veber, univ. dipl. inž. mag. Andro Glamnik,
Šolski center Celje Srednja šola za strojništvo, mehatroniko in medije SAMODEJNI VZDRŽEVALEC RASTLIN RAZISKOVALNA NALOGA Avtor: Nino Kuzma, M-4. c Mentorja: Matej Veber, univ. dipl. inž. mag. Andro Glamnik,
ŠOLA: SŠTS Šiška
 Naslov vaje: MEHKO SPAJKANJE Ime in priimek: 1 1.) WW tehnika (Wire-Wrap) Nekoč, v prvih dneh radio-tehnike se spajkanje elementov ni izvajalo s spajkanjem, ampak z navijanjem žic in sponami. Takšni spoji
Naslov vaje: MEHKO SPAJKANJE Ime in priimek: 1 1.) WW tehnika (Wire-Wrap) Nekoč, v prvih dneh radio-tehnike se spajkanje elementov ni izvajalo s spajkanjem, ampak z navijanjem žic in sponami. Takšni spoji
PowerPointova predstavitev
 Načrtujemo, razvijamo in izdelamo elektroniko po meri naročnika Svetujemo pri izbiri komponent, optimiziramo stroškovnike in proizvodni proces. Ključne kompetence Razvoj elektronike (hardware) Vgrajeni
Načrtujemo, razvijamo in izdelamo elektroniko po meri naročnika Svetujemo pri izbiri komponent, optimiziramo stroškovnike in proizvodni proces. Ključne kompetence Razvoj elektronike (hardware) Vgrajeni
Poročilo projekta : Učinkovita raba energije Primerjava klasične sončne elektrarne z sončno elektrarno ki sledi soncu. Cilj projekta: Cilj našega proj
 Poročilo projekta : Učinkovita raba energije Primerjava klasične sončne elektrarne z sončno elektrarno ki sledi soncu. Cilj projekta: Cilj našega projekta je bil izdelati učilo napravo za prikaz delovanja
Poročilo projekta : Učinkovita raba energije Primerjava klasične sončne elektrarne z sončno elektrarno ki sledi soncu. Cilj projekta: Cilj našega projekta je bil izdelati učilo napravo za prikaz delovanja
Kovinska protipoplavna KD vrata Življenje je kot reka, včasih mirna, drugič deroča a vedno polna presenečenj. Če vas v življenju p
 Kovinska protipoplavna KD vrata Življenje je kot reka, včasih mirna, drugič deroča a vedno polna presenečenj. Če vas v življenju ponese deroča voda, se lahko zaščitite, dokler se voda ne umiri. JUNIJ 2015
Kovinska protipoplavna KD vrata Življenje je kot reka, včasih mirna, drugič deroča a vedno polna presenečenj. Če vas v življenju ponese deroča voda, se lahko zaščitite, dokler se voda ne umiri. JUNIJ 2015
an-01-sl-Neprava_nadzorna_kamera_z_utripajoco_LED.docx
 SLO - NAVODILA ZA UPORABO IN MONTAŽO Kat. št.: 11 75 222 www.conrad.si NAVODILA ZA UPORABO Neprava nadzorna kamera z utripajočo LED Kataloška št.: 11 75 222 KAZALO PRAVILNA UPORABA... 3 VSEBINA PAKETA...
SLO - NAVODILA ZA UPORABO IN MONTAŽO Kat. št.: 11 75 222 www.conrad.si NAVODILA ZA UPORABO Neprava nadzorna kamera z utripajočo LED Kataloška št.: 11 75 222 KAZALO PRAVILNA UPORABA... 3 VSEBINA PAKETA...
Krmiljenje elektromotorj ev
 Krmiljenje elektromotorj ev Če enosmerni elektromotor priključimo na vir enosmerne napetosti, se gred motorja vrti ves čas v isto smer. Zamenjamo priključka (pola) baterije. Gred elektromotorja se vrti
Krmiljenje elektromotorj ev Če enosmerni elektromotor priključimo na vir enosmerne napetosti, se gred motorja vrti ves čas v isto smer. Zamenjamo priključka (pola) baterije. Gred elektromotorja se vrti
Navodila za uporabo Mini prenosna HD kamera s snemalnikom
 Navodila za uporabo Mini prenosna HD kamera s snemalnikom www.spyshop.eu Izdelku so priložena navodila v angleščini, ki poleg teksta prikazujejo tudi slikovni prikaz sestave in delovanja izdelka. Lastnosti
Navodila za uporabo Mini prenosna HD kamera s snemalnikom www.spyshop.eu Izdelku so priložena navodila v angleščini, ki poleg teksta prikazujejo tudi slikovni prikaz sestave in delovanja izdelka. Lastnosti
seminarska_naloga_za_ev
 Univerza v Ljubljani Fakulteta za elektrotehniko Matevž Seliger 8-kanalni Lightshow Seminarska naloga pri predmetu: V Horjulu, junij 2008 Kazalo: 1 Uvod... 3 1.1 Namen in uporaba izdelka... 3 2 Delovanje...
Univerza v Ljubljani Fakulteta za elektrotehniko Matevž Seliger 8-kanalni Lightshow Seminarska naloga pri predmetu: V Horjulu, junij 2008 Kazalo: 1 Uvod... 3 1.1 Namen in uporaba izdelka... 3 2 Delovanje...
SLO NAVODILA ZA UPORABO IN MONTAŽO Kat. št.: NAVODILA ZA UPORABO Laserliner tester napetosti AC tive Finder Kataloška št.: 12 3
 SLO NAVODILA ZA UPORABO IN MONTAŽO Kat. št.: 12 33 32 www.conrad.si NAVODILA ZA UPORABO Laserliner tester napetosti AC tive Finder Kataloška št.: 12 33 32 KAZALO 1. FUNKCIJE / UPORABA... 3 2. VARNOSTNI
SLO NAVODILA ZA UPORABO IN MONTAŽO Kat. št.: 12 33 32 www.conrad.si NAVODILA ZA UPORABO Laserliner tester napetosti AC tive Finder Kataloška št.: 12 33 32 KAZALO 1. FUNKCIJE / UPORABA... 3 2. VARNOSTNI
Področje uporabe
 Regulator Področja uporabe Regulator DIALOG EQ je namenjen predvsem vodenju in nadziranju sistemov ogrevanja in hlajenja, lahko pa se uporabi tudi na različnih področjih avtomatizacije in inteligentnih
Regulator Področja uporabe Regulator DIALOG EQ je namenjen predvsem vodenju in nadziranju sistemov ogrevanja in hlajenja, lahko pa se uporabi tudi na različnih področjih avtomatizacije in inteligentnih
Microsoft Word - Navodila_NSB2_SLO.doc
 Borovniško naselje 7 1412 Kisovec Slovenija Tel.: +386(0) 356 72 050 Fax.: +368(0)356 71 119 www.tevel.si Lastno varni napajalnik Tip NSB2/xx (NAVODILA ZA UPORABO) Navodila_NSB2_SLO.doc2/xx Stran 1 od
Borovniško naselje 7 1412 Kisovec Slovenija Tel.: +386(0) 356 72 050 Fax.: +368(0)356 71 119 www.tevel.si Lastno varni napajalnik Tip NSB2/xx (NAVODILA ZA UPORABO) Navodila_NSB2_SLO.doc2/xx Stran 1 od
Microsoft PowerPoint - MK 3 tehnicni sistemi.ppt
 Opredelitev tehničnega sistema Proces prenosa naravnih sistemov v tehnični sisteme, kot posledica človekovega ustvarjanja 1 Uvod - kaj predstavlja tehnični sistem, splošni primeri Predstavitev primera
Opredelitev tehničnega sistema Proces prenosa naravnih sistemov v tehnični sisteme, kot posledica človekovega ustvarjanja 1 Uvod - kaj predstavlja tehnični sistem, splošni primeri Predstavitev primera
Poskusi s kondenzatorji
 Poskusi s kondenzatorji Samo Lasič, Fakulteta za Matematiko in Fiziko, Oddelek za fiziko, Ljubljana Povzetek Opisani so nekateri poskusi s kondenzatorji, ki smo jih izvedli z merilnim vmesnikom LabPro.
Poskusi s kondenzatorji Samo Lasič, Fakulteta za Matematiko in Fiziko, Oddelek za fiziko, Ljubljana Povzetek Opisani so nekateri poskusi s kondenzatorji, ki smo jih izvedli z merilnim vmesnikom LabPro.
KRMILNA OMARICA KO-0
 KOTLOVSKA REGULACIJA Z ENIM OGREVALNIM KROGOM Siop Elektronika d.o.o., Dobro Polje 11b, 4243 Brezje, tel.: +386 4 53 09 150, fax: +386 4 53 09 151, gsm:+386 41 630 089 e-mail: info@siopelektronika.si,
KOTLOVSKA REGULACIJA Z ENIM OGREVALNIM KROGOM Siop Elektronika d.o.o., Dobro Polje 11b, 4243 Brezje, tel.: +386 4 53 09 150, fax: +386 4 53 09 151, gsm:+386 41 630 089 e-mail: info@siopelektronika.si,
Šolski center Celje Srednja šola za kemijo, elektrotehniko in računalništvo POSODOBITEV UČNE PRIPRAVE S PODROČJA KRMILNO-REGULACIJSKIH SISTEMOV Z MIKR
 Šolski center Celje Srednja šola za kemijo, elektrotehniko in računalništvo POSODOBITEV UČNE PRIPRAVE S PODROČJA KRMILNO-REGULACIJSKIH SISTEMOV Z MIKROKRMILNIKOM ARDUINO RAZISKOVALNA NALOGA AVTORJA Andraž
Šolski center Celje Srednja šola za kemijo, elektrotehniko in računalništvo POSODOBITEV UČNE PRIPRAVE S PODROČJA KRMILNO-REGULACIJSKIH SISTEMOV Z MIKROKRMILNIKOM ARDUINO RAZISKOVALNA NALOGA AVTORJA Andraž
Microsoft Word doc
 SLO - NAVODILO ZA NAMESTITEV IN UPORABO Št. izd. : 191097 www.conrad.si LED PREMIČNA SVETILKA Z JAVLJALNIKOM GIBANJA Št. izdelka: 191097 1 KAZALO 1 NAMEN UPORABE...3 2 VARNOSTNI IN NEVARNOSTNI NAPOTKI...3
SLO - NAVODILO ZA NAMESTITEV IN UPORABO Št. izd. : 191097 www.conrad.si LED PREMIČNA SVETILKA Z JAVLJALNIKOM GIBANJA Št. izdelka: 191097 1 KAZALO 1 NAMEN UPORABE...3 2 VARNOSTNI IN NEVARNOSTNI NAPOTKI...3
Microsoft PowerPoint - MK 3 tehnicni sistemi.ppt
 Opredelitev tehničnega sistema Proces prenosa naravnih sistemov v tehnični sisteme, kot posledica človekovega ustvarjanja 1 Uvod - kaj predstavlja tehnični sistem, splošni primeri Predstavitev primera
Opredelitev tehničnega sistema Proces prenosa naravnih sistemov v tehnični sisteme, kot posledica človekovega ustvarjanja 1 Uvod - kaj predstavlja tehnični sistem, splošni primeri Predstavitev primera
innbox_f60_navodila.indd
 Osnovna navodila Komunikacijski prehod Innbox F60 SFP AC Varnostna opozorila Pri uporabi opreme upoštevajte naslednja opozorila in varnostne ukrepe. Da bi v največji meri izkoristili najnovejšo tehnologijo
Osnovna navodila Komunikacijski prehod Innbox F60 SFP AC Varnostna opozorila Pri uporabi opreme upoštevajte naslednja opozorila in varnostne ukrepe. Da bi v največji meri izkoristili najnovejšo tehnologijo
SLO - NAVODILO ZA UPORABO IN MONTAŽO Št
 SLO - NAVODILA ZA UPORABO IN MONTAŽO Kat. št.: 19 14 56 www.conrad.si NAVODILA ZA UPORABO Univerzalni širokopasovni predojačevalnik Kemo B073, komplet za sestavljanje Kataloška št.: 19 14 56 Kazalo Slike...
SLO - NAVODILA ZA UPORABO IN MONTAŽO Kat. št.: 19 14 56 www.conrad.si NAVODILA ZA UPORABO Univerzalni širokopasovni predojačevalnik Kemo B073, komplet za sestavljanje Kataloška št.: 19 14 56 Kazalo Slike...
Microsoft PowerPoint - DPN_II__05__Zanesljivost.ppt [Compatibility Mode]
![Microsoft PowerPoint - DPN_II__05__Zanesljivost.ppt [Compatibility Mode]](/thumbs/100/145609579.jpg "Microsoft PowerPoint - DPN_II__05__Zanesljivost.ppt [Compatibility Mode]") Univerza v Ljubljani - Fakulteta za kemijo in kemijsko tehnologijo KATEDRA ZA TEHNIŠKO VARNOST Delovne naprave in priprave II Boris Jerman Prioriteta pri izboru načinov varovanja: a) vgrajena varnost;
Univerza v Ljubljani - Fakulteta za kemijo in kemijsko tehnologijo KATEDRA ZA TEHNIŠKO VARNOST Delovne naprave in priprave II Boris Jerman Prioriteta pri izboru načinov varovanja: a) vgrajena varnost;
BYOB Žogica v vesolju Besedilo naloge Glavna ideja igre je paziti, da žoga ne pade na tla igralne površine, pri tem pa zbrati čim več točk. Podobno ig
 BYOB Žogica v vesolju Besedilo naloge Glavna ideja igre je paziti, da žoga ne pade na tla igralne površe, pri tem pa zbrati čim več točk. Podobno igro najdemo tudi v knjigi Scratch (Lajovic, 2011), vendar
BYOB Žogica v vesolju Besedilo naloge Glavna ideja igre je paziti, da žoga ne pade na tla igralne površe, pri tem pa zbrati čim več točk. Podobno igro najdemo tudi v knjigi Scratch (Lajovic, 2011), vendar
VHF1-VHF2
 VHF BREZŽIČNI MIKROFONSKI KOMPLET VHF1: 1 CHANNEL VHF2: 2 CHANNELS NAVODILA ZA UPORABO SLO Hvala, ker ste izbrali naš BREZŽIČNI MIKROFONSKI KOMPLET IBIZA SOUND. Za vašo lastno varnost, preberite ta navodila
VHF BREZŽIČNI MIKROFONSKI KOMPLET VHF1: 1 CHANNEL VHF2: 2 CHANNELS NAVODILA ZA UPORABO SLO Hvala, ker ste izbrali naš BREZŽIČNI MIKROFONSKI KOMPLET IBIZA SOUND. Za vašo lastno varnost, preberite ta navodila
AME 110 NL / AME 120 NL
 Pogoni za zvezni regulacijski signal AME 110 NL, AME 120 NL Opis Ti pogoni se uporabljajo skupaj z kombiniranimi avtomatskimi omejevalniki pretoka z regulacijskim ventilom AB-QM DN 10 - DN 32. Ta pogon
Pogoni za zvezni regulacijski signal AME 110 NL, AME 120 NL Opis Ti pogoni se uporabljajo skupaj z kombiniranimi avtomatskimi omejevalniki pretoka z regulacijskim ventilom AB-QM DN 10 - DN 32. Ta pogon
50020_00426_E_DuoControl CS_010419_SL.indb
 DuoControl CS SL Navodila za vgradnjo Stran 2 DuoControl CS Kazalo Uporabljeni simboli... 2 Navodila za vgradnjo Obseg dobave... 3 Varnostna navodila... 3 Zaščita pred umazanijo / naoljenjem... 3 Mere
DuoControl CS SL Navodila za vgradnjo Stran 2 DuoControl CS Kazalo Uporabljeni simboli... 2 Navodila za vgradnjo Obseg dobave... 3 Varnostna navodila... 3 Zaščita pred umazanijo / naoljenjem... 3 Mere
an-01-Vodoodporna_prenosna_polnilna _postaja_Powerbank_Beltrona_Camouflage_5200_mAh.docx
 SLO - NAVODILA ZA UPORABO IN MONTAŽO Kat. št.: 130 76 00 www.conrad.si NAVODILA ZA UPORABO Vodoodporna prenosna polnilna postaja Powerbank Beltrona Camouflage 5200mAh Kataloška št.: 130 76 00 KAZALO 1.
SLO - NAVODILA ZA UPORABO IN MONTAŽO Kat. št.: 130 76 00 www.conrad.si NAVODILA ZA UPORABO Vodoodporna prenosna polnilna postaja Powerbank Beltrona Camouflage 5200mAh Kataloška št.: 130 76 00 KAZALO 1.
Microsoft Word - microtronic1.06
 Konfekcioniranje kablov Konfekcioniranje kablov je ena izmed glavnih dejavnosti s katero se ukvarja podjetje Microtronic. Večletne izkušnje na področju konfekcioniranja, tehnično znanje in primerna orodja,
Konfekcioniranje kablov Konfekcioniranje kablov je ena izmed glavnih dejavnosti s katero se ukvarja podjetje Microtronic. Večletne izkušnje na področju konfekcioniranja, tehnično znanje in primerna orodja,
OBČUTEK TOPLINE ZA DOBRO POČUTJE OLJNI RADIATORJI gorenje.si
 OBČUTEK TOPLINE ZA DOBRO POČUTJE OLJNI RADIATORJI gorenje.si OBČUTEK TOPLINE ZA DOBRO POČUTJE Oljni radiatorji so odlična izbira za dodatno ogrevanje najrazličnejših prostorov. S pomočjo koles jih z lahkoto
OBČUTEK TOPLINE ZA DOBRO POČUTJE OLJNI RADIATORJI gorenje.si OBČUTEK TOPLINE ZA DOBRO POČUTJE Oljni radiatorji so odlična izbira za dodatno ogrevanje najrazličnejših prostorov. S pomočjo koles jih z lahkoto
FOR SMARTER PEOPLE TAKO SE VLOMI PREPREČUJEJO DANES REHAU Smart Guard System plus preventivna protivlomna zaščita WINDOWS. REINVENTED FOR MODERN LIFE.
 FOR SMARTER PEOPLE TAKO SE VLOMI PREPREČUJEJO DANES REHAU Smart Guard System plus preventivna protivlomna zaščita WINDOWS. REINVENTED FOR MODERN LIFE. NA NOVO ZASNOVANA OKNA Za današnje življenje Naše
FOR SMARTER PEOPLE TAKO SE VLOMI PREPREČUJEJO DANES REHAU Smart Guard System plus preventivna protivlomna zaščita WINDOWS. REINVENTED FOR MODERN LIFE. NA NOVO ZASNOVANA OKNA Za današnje življenje Naše
Overview
 SMETARSKA VOZILA ROS ROCA Olympus nadgradnja na dvoosnem vozilu Olympus nadgradnja na triosnem vozilu Olympus Nova zasnova smetarskega vozila od Januarja 2010 Opravljen trpežnosti test je ekvivalenten
SMETARSKA VOZILA ROS ROCA Olympus nadgradnja na dvoosnem vozilu Olympus nadgradnja na triosnem vozilu Olympus Nova zasnova smetarskega vozila od Januarja 2010 Opravljen trpežnosti test je ekvivalenten
Šolski center Celje Srednja šola za kemijo, elektrotehniko in računalništvo NADZOR MIKROKLIME V PROSTORU Z MIKROKRMILNIKOM ARDUINO RAZISKOVALNA NALOGA
 Šolski center Celje Srednja šola za kemijo, elektrotehniko in računalništvo NADZOR MIKROKLIME V PROSTORU Z MIKROKRMILNIKOM ARDUINO RAZISKOVALNA NALOGA AVTORJA Andraž Špan Rok Lešnik MENTOR Andrej Grilc
Šolski center Celje Srednja šola za kemijo, elektrotehniko in računalništvo NADZOR MIKROKLIME V PROSTORU Z MIKROKRMILNIKOM ARDUINO RAZISKOVALNA NALOGA AVTORJA Andraž Špan Rok Lešnik MENTOR Andrej Grilc
BeoLab 12 BeoLab 12 2 BeoLab 12 3
 BeoLab 12 BeoLab 12 2 BeoLab 12 3 Pridržujemo si pravico do sprememb tehničnih podatkov, podatkov o lastnostih izdelkov in njihovi uporabi, ki jih navaja ta priročnik, brez predhodnega obvestila. Različica
BeoLab 12 BeoLab 12 2 BeoLab 12 3 Pridržujemo si pravico do sprememb tehničnih podatkov, podatkov o lastnostih izdelkov in njihovi uporabi, ki jih navaja ta priročnik, brez predhodnega obvestila. Različica
1 Tekmovanje gradbenih tehnikov v izdelavi mostu iz špagetov 1.1 Ekipa Ekipa sestoji iz treh članov, ki jih mentor po predhodni izbiri prijavi na tekm
 1 Tekmovanje gradbenih tehnikov v izdelavi mostu iz špagetov 1.1 Ekipa Ekipa sestoji iz treh članov, ki jih mentor po predhodni izbiri prijavi na tekmovanje. Končni izdelek mora biti produkt lastnega dela
1 Tekmovanje gradbenih tehnikov v izdelavi mostu iz špagetov 1.1 Ekipa Ekipa sestoji iz treh članov, ki jih mentor po predhodni izbiri prijavi na tekmovanje. Končni izdelek mora biti produkt lastnega dela
SLO NAVODILA ZA UPORABO IN MONTAŽO Kat. št.: NAVODILA ZA UPORABO Univerzalni zračni kompresor Bruder Mannesmann 097 T Kataloška
 SLO NAVODILA ZA UPORABO IN MONTAŽO Kat. št.: 48 29 72 www.conrad.si NAVODILA ZA UPORABO Univerzalni zračni kompresor Bruder Mannesmann 097 T Kataloška št.: 48 29 72 KAZALO SESTAVNI DELI NAPRAVE...3 NAMEN
SLO NAVODILA ZA UPORABO IN MONTAŽO Kat. št.: 48 29 72 www.conrad.si NAVODILA ZA UPORABO Univerzalni zračni kompresor Bruder Mannesmann 097 T Kataloška št.: 48 29 72 KAZALO SESTAVNI DELI NAPRAVE...3 NAMEN
NAVODILA ZA UPORABO K01-WIFI Hvala, ker ste se odločili za nakup našega izdelka. Pred uporabo enote skrbno preberite ta Navodila za uporabo in jih shr
 NAVODILA ZA UPORABO Hvala, ker ste se odločili za nakup našega izdelka. Pred uporabo enote skrbno preberite ta in jih shranite za prihodnjo rabo Vsebina 1. Pregled 2. Sistem 3. Prednosti 4. Upravljanje
NAVODILA ZA UPORABO Hvala, ker ste se odločili za nakup našega izdelka. Pred uporabo enote skrbno preberite ta in jih shranite za prihodnjo rabo Vsebina 1. Pregled 2. Sistem 3. Prednosti 4. Upravljanje
(Slovenian) DM-HB Navodila za trgovce CESTNO MTB Treking Mestno izletniško/ udobno kolo URBANO ŠPORTNO E-BIKE HB-M3050 FH-M3050 HB-MT200 FH-MT2
 DM-HB Navodila za trgovce CESTNO MTB Treking Mestno izletniško/ udobno kolo URBANO ŠPORTNO E-BIKE HB-M3050 FH-M3050 HB-MT200 FH-MT2") (Slovenian) DM-HB0005-04 Navodila za trgovce CESTNO MTB Treking Mestno izletniško/ udobno kolo URBANO ŠPORTNO E-BIKE HB-M3050 FH-M3050 HB-MT200 FH-MT200-B HB-RM33 FH-RM33 FH-RM35 HB-TX505 FH-TX505 Prednje
(Slovenian) DM-HB0005-04 Navodila za trgovce CESTNO MTB Treking Mestno izletniško/ udobno kolo URBANO ŠPORTNO E-BIKE HB-M3050 FH-M3050 HB-MT200 FH-MT200-B HB-RM33 FH-RM33 FH-RM35 HB-TX505 FH-TX505 Prednje
an-01-USB_digitalni_zvocniki_Logitech_S-150.docx
 SLO - NAVODILA ZA UPORABO IN MONTAŽO Kat. št.: 91 60 80 www.conrad.si NAVODILA ZA UPORABO USB digitalni zvočniki Logitech S-150 Kataloška št.: 91 60 80 KAZALO 1. VARNOSTNI NAPOTKI... 3 2. NASTAVITEV VAŠIH
SLO - NAVODILA ZA UPORABO IN MONTAŽO Kat. št.: 91 60 80 www.conrad.si NAVODILA ZA UPORABO USB digitalni zvočniki Logitech S-150 Kataloška št.: 91 60 80 KAZALO 1. VARNOSTNI NAPOTKI... 3 2. NASTAVITEV VAŠIH
101353_-an-01-sl-_vbodni_termometer
 SLO - NAVODILO ZA NAMESTITEV IN UPORABO Št. izd. : 101353 www.conrad.si TFA LT-102 VBODNI TERMOMETER Št. izdelka: 101353 1 KAZALO 1 LASTNOSTI...3 2 LCD ZASLON...3 3 ZAČETEK OBRATOVANJA...3 4 UPRAVLJANJE...4
SLO - NAVODILO ZA NAMESTITEV IN UPORABO Št. izd. : 101353 www.conrad.si TFA LT-102 VBODNI TERMOMETER Št. izdelka: 101353 1 KAZALO 1 LASTNOSTI...3 2 LCD ZASLON...3 3 ZAČETEK OBRATOVANJA...3 4 UPRAVLJANJE...4
Inspiron Series 2-in-1 Priročnik za servisiranje
 Inspiron 13 5000 Series 2-in-1 Priročnik za servisiranje Model računalnika: Inspiron 13-5368 Regulativni model: P69G Regulativni tip: P69G001 Opombe, svarila in opozorila OPOMBA: OPOMBA označuje pomembne
Inspiron 13 5000 Series 2-in-1 Priročnik za servisiranje Model računalnika: Inspiron 13-5368 Regulativni model: P69G Regulativni tip: P69G001 Opombe, svarila in opozorila OPOMBA: OPOMBA označuje pomembne
Univerza v Ljubljani
 Univerza v Ljubljani Fakulteta za elektrotehniko Jernej Plankar IR vmesnik za prenos zvoka Seminarska naloga pri predmetu Elektronska vezja V Ljubljani, avgust 2011 Jernej Plankar IR prenos zvoka 2 1 UVOD
Univerza v Ljubljani Fakulteta za elektrotehniko Jernej Plankar IR vmesnik za prenos zvoka Seminarska naloga pri predmetu Elektronska vezja V Ljubljani, avgust 2011 Jernej Plankar IR prenos zvoka 2 1 UVOD
Serija ZT400™ Kratka navodila
 Serija ZT400 Kratka navodila S temi navodili si lahko pomagate pri vsakodnevni uporabi tiskalnika. Podrobnejša navodila poiščite v Uporabniškem priročniku. Komponente tiskalnika Slika 1 prikazuje komponente
Serija ZT400 Kratka navodila S temi navodili si lahko pomagate pri vsakodnevni uporabi tiskalnika. Podrobnejša navodila poiščite v Uporabniškem priročniku. Komponente tiskalnika Slika 1 prikazuje komponente
VETRNO KOLO
 VETRNO KOLO KAZALO: Zgodovina Razvoj vetrnic Vrste vetrnic Značilnosti Uporaba Sestavni deli Delovanje Animacije Prednosti in slabosti Viri in literatura ZGODOVINA: Ljudje izkoriščamo energijo vetra že
VETRNO KOLO KAZALO: Zgodovina Razvoj vetrnic Vrste vetrnic Značilnosti Uporaba Sestavni deli Delovanje Animacije Prednosti in slabosti Viri in literatura ZGODOVINA: Ljudje izkoriščamo energijo vetra že
Poročilo o opravljenem delu pri praktičnem pouku fizike: MERJENJE S KLJUNASTIM MERILOM Ime in priimek: Mitja Kočevar Razred: 1. f Učitelj: Otmar Uranj
 Poročilo o opravljenem delu pri praktičnem pouku fizike: MERJENJE S KLJUNASTIM MERILOM Ime in priimek: Mitja Kočevar Razred: 1. f Učitelj: Otmar Uranjek, prof. fizike Datum izvedbe vaje: 11. 11. 2005 Uvod
Poročilo o opravljenem delu pri praktičnem pouku fizike: MERJENJE S KLJUNASTIM MERILOM Ime in priimek: Mitja Kočevar Razred: 1. f Učitelj: Otmar Uranjek, prof. fizike Datum izvedbe vaje: 11. 11. 2005 Uvod
Microsoft Word - Trust-CDsize-12052_12579_14070-al-cp_v5.0.doc
 PRIROČNIK ZA UPORABO manual Version 5.0 SI TABLET TB-1100 / TB2100 TABLET TB-3100 / TB-4200 1 A B TABLET TB-2100-3100-4200 2 3 4 5 A 6 7 B 8 9 10 11 B A C D 12 A B 13 14 C 15 16 17 18 PRIROČNIK ZA UPORABO
PRIROČNIK ZA UPORABO manual Version 5.0 SI TABLET TB-1100 / TB2100 TABLET TB-3100 / TB-4200 1 A B TABLET TB-2100-3100-4200 2 3 4 5 A 6 7 B 8 9 10 11 B A C D 12 A B 13 14 C 15 16 17 18 PRIROČNIK ZA UPORABO
Microsoft Word - CelotniPraktikum_2011_verZaTisk.doc
 Elektrotehniški praktikum Sila v elektrostatičnem polju Namen vaje Našli bomo podobnost med poljem mirujočih nabojev in poljem mas, ter kakšen vpliv ima relativna vlažnost zraka na hitrost razelektritve
Elektrotehniški praktikum Sila v elektrostatičnem polju Namen vaje Našli bomo podobnost med poljem mirujočih nabojev in poljem mas, ter kakšen vpliv ima relativna vlažnost zraka na hitrost razelektritve
Microsoft Word doc
 SLO - NAVODILO ZA MONTAŽO IN UPORABO : št. art. : 90 79 14 www.conrad.si Zvočniki Hercules XPS 2,1 20 Gloss Št. izdelka: 90 79 14 Navodila za uporabo so sestavni del izdelka. Vsebujejo pomembne napotke
SLO - NAVODILO ZA MONTAŽO IN UPORABO : št. art. : 90 79 14 www.conrad.si Zvočniki Hercules XPS 2,1 20 Gloss Št. izdelka: 90 79 14 Navodila za uporabo so sestavni del izdelka. Vsebujejo pomembne napotke
BDV-N890W/BDV-N790W
 Sistem za domači kino s predvajalnikom Blu-ray Disc /DVD BDV-N890W BDV-N790W SI Začnite tukaj Kratka navodila za postavitev in uporabo BDV-N790W BDV-N890W 1 Vsebina embalaže/nastavitev zvočnikov BDV-N890W
Sistem za domači kino s predvajalnikom Blu-ray Disc /DVD BDV-N890W BDV-N790W SI Začnite tukaj Kratka navodila za postavitev in uporabo BDV-N790W BDV-N890W 1 Vsebina embalaže/nastavitev zvočnikov BDV-N890W
Base NET.cdr
 Rešitev fiksnega radijskega odčitavanja Delovanje BaseNet je način odčitavanja porabe vode, toplote, elektrike, plina in delilnikov toplote v fiksnem radijskem omrežju. Merilnike v Sensus Base sistemu
Rešitev fiksnega radijskega odčitavanja Delovanje BaseNet je način odčitavanja porabe vode, toplote, elektrike, plina in delilnikov toplote v fiksnem radijskem omrežju. Merilnike v Sensus Base sistemu
Besedilo naloge:
 naliza elektronskih komponent 4. Vaja: Preverjanje delovanja polprevodniških komponent Polprevodniške komponente v močnostnih stopnjah so pogosto vzrok odpovedi, zato je poznavanje metod hitrega preverjanja
naliza elektronskih komponent 4. Vaja: Preverjanje delovanja polprevodniških komponent Polprevodniške komponente v močnostnih stopnjah so pogosto vzrok odpovedi, zato je poznavanje metod hitrega preverjanja
Microsoft PowerPoint - OVT_4_IzolacijskiMat_v1.pptx
 Osnove visokonapetostne tehnike Izolacijski materiali Boštjan Blažič bostjan.blazic@fe.uni lj.si leon.fe.uni lj.si 01 4768 414 013/14 Izolacijski materiali Delitev: plinasti, tekoči, trdni Plinasti dielektriki
Osnove visokonapetostne tehnike Izolacijski materiali Boštjan Blažič bostjan.blazic@fe.uni lj.si leon.fe.uni lj.si 01 4768 414 013/14 Izolacijski materiali Delitev: plinasti, tekoči, trdni Plinasti dielektriki
Microsoft Word - NOVA DELOVNA OBLEKA - KAPA_KONCNI-3.doc
 GASILSKA ZVEZA SLOVENIJE GASILSKA DELOVNA OBLEKA KAPA Standard kakovosti :GZS-DO-K-2013-1A Datum:24.09. 2013 1. PREDMET STANDARDA Ta standard se nanaša na kapo, ki je sestavni del gasilske delovne obleke.
GASILSKA ZVEZA SLOVENIJE GASILSKA DELOVNA OBLEKA KAPA Standard kakovosti :GZS-DO-K-2013-1A Datum:24.09. 2013 1. PREDMET STANDARDA Ta standard se nanaša na kapo, ki je sestavni del gasilske delovne obleke.
Vedno pod nadzorom, kjerkoli že ste
 Vedno pod nadzorom, kjerkoli že ste 02 Vedno pod nadzorom, kjerkoli že ste Daikin zagotavlja novo rešitev za nadzorovanje in krmiljenje glavnih funkcij stanovanjskih notranjih enot. Sistem deluje na uporabniku
Vedno pod nadzorom, kjerkoli že ste 02 Vedno pod nadzorom, kjerkoli že ste Daikin zagotavlja novo rešitev za nadzorovanje in krmiljenje glavnih funkcij stanovanjskih notranjih enot. Sistem deluje na uporabniku
SLO - NAVODILO ZA UPORABO IN MONTAŽO Št
 SLO - NAVODILA ZA UPORABO IN MONTAŽO Kat. št.: 97 37 62 www.conrad.si NAVODILA ZA UPORABO Kartica ExpressCard z 2 vrati USB 3.0 Kataloška št.: 97 37 62 Kazalo Predvidena uporaba... 2 Vsebina paketa...
SLO - NAVODILA ZA UPORABO IN MONTAŽO Kat. št.: 97 37 62 www.conrad.si NAVODILA ZA UPORABO Kartica ExpressCard z 2 vrati USB 3.0 Kataloška št.: 97 37 62 Kazalo Predvidena uporaba... 2 Vsebina paketa...
Navodila za montažo WC DESKA IZDELANO V NEMČIJI myhansecontrol.com myhansecontrol.com Uporabniku prijazna navodila ID: #05000
 Navodila za montažo WC DESKA IZDELANO V NEMČIJI myhansecontrol.com myhansecontrol.com Uporabniku prijazna navodila ID: #05000 Hitro in preprosto do cilja s kodami QR Ne glede na to, ali potrebujete informacije
Navodila za montažo WC DESKA IZDELANO V NEMČIJI myhansecontrol.com myhansecontrol.com Uporabniku prijazna navodila ID: #05000 Hitro in preprosto do cilja s kodami QR Ne glede na to, ali potrebujete informacije
DES
 Laboratorij za načrtovanje integriranih vezij Univerza v Ljubljani Fakulteta za elektrotehniko Digitalni Elektronski Sistemi Digitalni sistemi Vgrajeni digitalni sistemi Digitalni sistem: osebni računalnik
Laboratorij za načrtovanje integriranih vezij Univerza v Ljubljani Fakulteta za elektrotehniko Digitalni Elektronski Sistemi Digitalni sistemi Vgrajeni digitalni sistemi Digitalni sistem: osebni računalnik
an-01-Stikalo_za_luc_za_na_stopnisce_Zamel_ASP-01.docx
 SLO - NAVODILA ZA UPORABO IN MONTAŽO Kat. št.: 146 29 41 www.conrad.si NAVODILA ZA UPORABO Časovno stikalo za luč za na stopnišče Zamel ASP-01 Kataloška št.: 146 29 41 KAZALO OPIS NAPRAVE... 3 LASTNOSTI...
SLO - NAVODILA ZA UPORABO IN MONTAŽO Kat. št.: 146 29 41 www.conrad.si NAVODILA ZA UPORABO Časovno stikalo za luč za na stopnišče Zamel ASP-01 Kataloška št.: 146 29 41 KAZALO OPIS NAPRAVE... 3 LASTNOSTI...
SLO NAVODILA ZA UPORABO IN MONTAŽO Kat. št.: NAVODILA ZA UPORABO Merilnik ogljikovega monoksida Testo Kataloška št.: 10 1
 SLO NAVODILA ZA UPORABO IN MONTAŽO Kat. št.: 10 16 57 www.conrad.si NAVODILA ZA UPORABO Merilnik ogljikovega monoksida Testo 317 3 Kataloška št.: 10 16 57 KAZALO NAMEN UPORABE...3 TEHNIČNI PODATKI...3
SLO NAVODILA ZA UPORABO IN MONTAŽO Kat. št.: 10 16 57 www.conrad.si NAVODILA ZA UPORABO Merilnik ogljikovega monoksida Testo 317 3 Kataloška št.: 10 16 57 KAZALO NAMEN UPORABE...3 TEHNIČNI PODATKI...3
Microsoft Word - Pravila - AJKTM 2016.docx
 PRAVILA ALI JE KAJ TRDEN MOST 2016 3. maj 5. maj 2016 10. 4. 2016 Maribor, Slovenija 1 Osnove o tekmovanju 1.1 Ekipa Ekipa sestoji iz treh članov, ki so se po predhodnem postopku prijavili na tekmovanje
PRAVILA ALI JE KAJ TRDEN MOST 2016 3. maj 5. maj 2016 10. 4. 2016 Maribor, Slovenija 1 Osnove o tekmovanju 1.1 Ekipa Ekipa sestoji iz treh članov, ki so se po predhodnem postopku prijavili na tekmovanje
10. Meritev šumnega števila ojačevalnika Vsako radijsko zvezo načrtujemo za zahtevano razmerje signal/šum. Šum ima vsaj dva izvora: naravni šum T A, k
 10. Meritev šumnega števila ojačevalnika Vsako radijsko zvezo načrtujemo za zahtevano razmerje signal/šum. Šum ima vsaj dva izvora: naravni šum T A, ki ga sprejme antena in dodatni šum T S radijskega sprejemnika.
10. Meritev šumnega števila ojačevalnika Vsako radijsko zvezo načrtujemo za zahtevano razmerje signal/šum. Šum ima vsaj dva izvora: naravni šum T A, ki ga sprejme antena in dodatni šum T S radijskega sprejemnika.
LABORATORIJSKE VAJE IZ FIZIKE
 UVOD LABORATORIJSKE VAJE IZ FIZIKE V tem šolskem letu ste se odločili za fiziko kot izbirni predmet. Laboratorijske vaje boste opravljali med poukom od začetka oktobra do konca aprila. Zunanji kandidati
UVOD LABORATORIJSKE VAJE IZ FIZIKE V tem šolskem letu ste se odločili za fiziko kot izbirni predmet. Laboratorijske vaje boste opravljali med poukom od začetka oktobra do konca aprila. Zunanji kandidati
No Slide Title
 Glavne napake-pomoč KRONOS 1 Diagnostika in dostop do sistema PEČICA NAPAKA NAPAKA PRIKAZANA Z KODO NAPAKE NAPAKA BREZ INDIKACIJE KODE NAPAKE 2 Diagnostika in dostop do sistema Prikaz kode napake Informacije
Glavne napake-pomoč KRONOS 1 Diagnostika in dostop do sistema PEČICA NAPAKA NAPAKA PRIKAZANA Z KODO NAPAKE NAPAKA BREZ INDIKACIJE KODE NAPAKE 2 Diagnostika in dostop do sistema Prikaz kode napake Informacije
Univerza v Ljubljani FAKULTETA ZA RAČUNALNIŠTVO IN INFORMATIKO Tržaška c. 25, 1000 Ljubljana Realizacija n-bitnega polnega seštevalnika z uporabo kvan
 Univerza v Ljubljani FAKULTETA ZA RAČUNALNIŠTVO IN INFORMATIKO Tržaška c. 25, 1000 Ljubljana Realizacija n-bitnega polnega seštevalnika z uporabo kvantnih celičnih avtomatov SEMINARSKA NALOGA Univerzitetna
Univerza v Ljubljani FAKULTETA ZA RAČUNALNIŠTVO IN INFORMATIKO Tržaška c. 25, 1000 Ljubljana Realizacija n-bitnega polnega seštevalnika z uporabo kvantnih celičnih avtomatov SEMINARSKA NALOGA Univerzitetna
NAVODILO ZA UPORABO APARATA CETI MAX MONO Monokularni biološki mikroskop Kratka navodila za rokovanje z instrumentom. Pred uporabo dobro preberi tudi
 NAVODILO ZA UPORABO APARATA CETI MAX MONO Monokularni biološki mikroskop Kratka navodila za rokovanje z instrumentom. Pred uporabo dobro preberi tudi originalna navodila, posebej za uporabo vseh možnih
NAVODILO ZA UPORABO APARATA CETI MAX MONO Monokularni biološki mikroskop Kratka navodila za rokovanje z instrumentom. Pred uporabo dobro preberi tudi originalna navodila, posebej za uporabo vseh možnih
UNI-bet plus
 NAVODILO ZA UPORABO PLEZALK UNI-Met+400, UN-Met+450, UNI-Met+550 Univerzalne plezalke za plezanje na betonske, plastične in železne drogove. Navodilo za uporabo UNI-met + plezalk za plezanje na betonske,
NAVODILO ZA UPORABO PLEZALK UNI-Met+400, UN-Met+450, UNI-Met+550 Univerzalne plezalke za plezanje na betonske, plastične in železne drogove. Navodilo za uporabo UNI-met + plezalk za plezanje na betonske,
Upravljanje sistema COBISS Navodila za uporabo tiskalnika CITIZEN S310II V1.0 VIF-NA-27-SI
 Navodila za uporabo tiskalnika CITIZEN S310II V1.0 VIF-NA-27-SI IZUM, 2015 COBISS, COMARC, COBIB, COLIB, IZUM so zaščitene znamke v lasti javnega zavoda IZUM. KAZALO VSEBINE 1 Uvod... 1 2 Uporaba tiskalnika...
Navodila za uporabo tiskalnika CITIZEN S310II V1.0 VIF-NA-27-SI IZUM, 2015 COBISS, COMARC, COBIB, COLIB, IZUM so zaščitene znamke v lasti javnega zavoda IZUM. KAZALO VSEBINE 1 Uvod... 1 2 Uporaba tiskalnika...
Installation manual
 EKRTR EKRTETS 1 2 1 2 3 60 87 170 161 ±1.5 m >0.2 m 3 5 4 34 125 4 5 28 50 EKRTR EKRTETS Vsebina Pred zagonom naprave pozorno preberite ta priročnik. Ne zavrzite ga. Spravite ga na varno mesto, ker ga
EKRTR EKRTETS 1 2 1 2 3 60 87 170 161 ±1.5 m >0.2 m 3 5 4 34 125 4 5 28 50 EKRTR EKRTETS Vsebina Pred zagonom naprave pozorno preberite ta priročnik. Ne zavrzite ga. Spravite ga na varno mesto, ker ga
Microsoft Word doc
 SLO - NAVODILO ZA MONTAŽO IN UPORABO Št. art. : 512375 www.conrad.si DC-AC RAZSMERNIK PI 75-12 Št. artikla: 512375 1 KAZALO VSEBINE 1 NAMEN UPORABE... 3 2 RAZLAGA SIMBOLOV... 3 3 VARNOSTNA OPOZORILA...
SLO - NAVODILO ZA MONTAŽO IN UPORABO Št. art. : 512375 www.conrad.si DC-AC RAZSMERNIK PI 75-12 Št. artikla: 512375 1 KAZALO VSEBINE 1 NAMEN UPORABE... 3 2 RAZLAGA SIMBOLOV... 3 3 VARNOSTNA OPOZORILA...
SLO NAVODILA ZA UPORABO IN MONTAŽO Kat. št.: NAVODILA ZA UPORABO Tonski generator IDEAL Electrical PRO Kataloška št.:
 SLO NAVODILA ZA UPORABO IN MONTAŽO Kat. št.: 61 90 90 www.conrad.si NAVODILA ZA UPORABO Tonski generator IDEAL Electrical PRO Kataloška št.: 61 90 90 KAZALO LASTNOSTI NAPRAVE...3 SESTAVNI DELI NAPRAVE...3
SLO NAVODILA ZA UPORABO IN MONTAŽO Kat. št.: 61 90 90 www.conrad.si NAVODILA ZA UPORABO Tonski generator IDEAL Electrical PRO Kataloška št.: 61 90 90 KAZALO LASTNOSTI NAPRAVE...3 SESTAVNI DELI NAPRAVE...3
Microsoft Word - ABB Robotski sistem za varjene osnove kontejnerja ASM-13.doc
 Posvet AVTOMATIZACIJA STREGE IN MONTAŽE 2013 Ljubljana, 4.december 2013 ABB ROBOTSKI SISTEM ZA VARJENJE OSNOVE KONTEJNERJA, Robert LOGAR POVZETEK Robotski sistemi se pogosteje uporabljajo za izdelavo izdelkov
Posvet AVTOMATIZACIJA STREGE IN MONTAŽE 2013 Ljubljana, 4.december 2013 ABB ROBOTSKI SISTEM ZA VARJENJE OSNOVE KONTEJNERJA, Robert LOGAR POVZETEK Robotski sistemi se pogosteje uporabljajo za izdelavo izdelkov
Microsoft Word - Avditorne.docx
 1. Naloga Delovanje oscilatorja je odvisno od kapacitivnosti kondenzatorja C. Dopustno območje izhodnih frekvenc je podano z dopustnim območjem kapacitivnosti C od 1,35 do 1,61 nf. Uporabljen je kondenzator
1. Naloga Delovanje oscilatorja je odvisno od kapacitivnosti kondenzatorja C. Dopustno območje izhodnih frekvenc je podano z dopustnim območjem kapacitivnosti C od 1,35 do 1,61 nf. Uporabljen je kondenzator
Microsoft Word doc
 SLO - NAVODILO ZA NAMESTITEV IN UPORABO Št. izd. : 122383 www.conrad.si ROČNI OSCILOSKOP VELLEMAN HPS140 Št. izdelka: 122383 1 KAZALO 1 MED UPORABO... 3 2 LASTNOSTI IN TEHNIČNI PODATKI... 3 3 OPIS SPREDNJE
SLO - NAVODILO ZA NAMESTITEV IN UPORABO Št. izd. : 122383 www.conrad.si ROČNI OSCILOSKOP VELLEMAN HPS140 Št. izdelka: 122383 1 KAZALO 1 MED UPORABO... 3 2 LASTNOSTI IN TEHNIČNI PODATKI... 3 3 OPIS SPREDNJE
SLO - NAVODILO ZA NAMESTITEV IN UPORABO Št. izd. : HD AKCIJSKA KAMERA MIDLAND XTREME XTC 200 Št. izdelka:
 SLO - NAVODILO ZA NAMESTITEV IN UPORABO Št. izd. : 860750 www.conrad.si HD AKCIJSKA KAMERA MIDLAND XTREME XTC 200 Št. izdelka: 860750 1 AKCIJSKA KAMERA XTC 200 Zahvaljujemo se vam za nakup akcijske kamere
SLO - NAVODILO ZA NAMESTITEV IN UPORABO Št. izd. : 860750 www.conrad.si HD AKCIJSKA KAMERA MIDLAND XTREME XTC 200 Št. izdelka: 860750 1 AKCIJSKA KAMERA XTC 200 Zahvaljujemo se vam za nakup akcijske kamere
Microsoft Word - ELEKTROTEHNIKA2_11. junij 2104
 Šifra kandidata: Srednja elektro šola in tehniška gimnazija ELEKTROTEHNIKA PISNA IZPITNA POLA 1 11. junij 2014 Čas pisanja 40 minut Dovoljeno dodatno gradivo in pripomočki: Kandidat prinese nalivno pero
Šifra kandidata: Srednja elektro šola in tehniška gimnazija ELEKTROTEHNIKA PISNA IZPITNA POLA 1 11. junij 2014 Čas pisanja 40 minut Dovoljeno dodatno gradivo in pripomočki: Kandidat prinese nalivno pero
CelotniPraktikum_2011_verZaTisk.pdf
 Elektrotehniški praktikum Osnove digitalnih vezij Namen vaje Videti, kako delujejo osnovna dvovhodna logi na vezja v obliki integriranih vezij oziroma, kako opravljajo logi ne funkcije Boolove algebre.
Elektrotehniški praktikum Osnove digitalnih vezij Namen vaje Videti, kako delujejo osnovna dvovhodna logi na vezja v obliki integriranih vezij oziroma, kako opravljajo logi ne funkcije Boolove algebre.
Delavnica Načrtovanje digitalnih vezij
 Laboratorij za načrtovanje integriranih vezij Univerza v Ljubljani Fakulteta za elektrotehniko Digitalni Elektronski Sistemi Osnove jezika VHDL Strukturno načrtovanje in testiranje Struktura vezja s komponentami
Laboratorij za načrtovanje integriranih vezij Univerza v Ljubljani Fakulteta za elektrotehniko Digitalni Elektronski Sistemi Osnove jezika VHDL Strukturno načrtovanje in testiranje Struktura vezja s komponentami
10108-Bench-mark-brochure-6pg.indd
 Unikatna konstrukcija mostu Kompaktna izvedba O podjetju Perceptron: Temperaturna kompenzacija stroja in merjenca (opcijsko) X in Y osi na isti stopnji za povečano togost Perceptron (NASDAQ: PRCP) zagotavlja
Unikatna konstrukcija mostu Kompaktna izvedba O podjetju Perceptron: Temperaturna kompenzacija stroja in merjenca (opcijsko) X in Y osi na isti stopnji za povečano togost Perceptron (NASDAQ: PRCP) zagotavlja
Presentation‘s Main Title
 JUBIZOL Izvedba detajlov fasade načrtovanje in pregled izvedbe v praksi 1 Aleš Kovač d.i.g. JUB d.o.o. ; ales.kovac@jub.eu Obdelava COKLA Slaba praksa Direktno stikovanje z asfaltom? VROČINA!! 2 Obdelava
JUBIZOL Izvedba detajlov fasade načrtovanje in pregled izvedbe v praksi 1 Aleš Kovač d.i.g. JUB d.o.o. ; ales.kovac@jub.eu Obdelava COKLA Slaba praksa Direktno stikovanje z asfaltom? VROČINA!! 2 Obdelava
Računalniški praktikum Projektna naloga - Izdelava spletne strani Avtor: Matej Tekavčič Skupina: Matej Tekavčič - koordinator Simon Vrhovnik Tine Kavč
 Računalniški praktikum Projektna naloga - Izdelava spletne strani Avtor: Matej Tekavčič Skupina: Matej Tekavčič - koordinator Simon Vrhovnik Tine Kavčič Matjaž Jerman 8. februar 2006 Kazalo 1 Uvod 2 2
Računalniški praktikum Projektna naloga - Izdelava spletne strani Avtor: Matej Tekavčič Skupina: Matej Tekavčič - koordinator Simon Vrhovnik Tine Kavčič Matjaž Jerman 8. februar 2006 Kazalo 1 Uvod 2 2
Inspiron Series Priročnik za servisiranje
 Inspiron 22 3000 Series Priročnik za servisiranje Model računalnika: Inspiron 22 3265 Regulativni model: W17B Regulativni tip: W17B001 Opombe, svarila in opozorila OPOMBA: OPOMBA označuje pomembne informacije,
Inspiron 22 3000 Series Priročnik za servisiranje Model računalnika: Inspiron 22 3265 Regulativni model: W17B Regulativni tip: W17B001 Opombe, svarila in opozorila OPOMBA: OPOMBA označuje pomembne informacije,
Microsoft Word - ELEKTROTEHNIKA2_ junij 2013_pola1 in 2
 Šifra kandidata: Srednja elektro šola in tehniška gimnazija ELEKTROTEHNIKA PISNA IZPITNA POLA 1 12. junij 2013 Čas pisanja 40 minut Dovoljeno dodatno gradivo in pripomočki: Kandidat prinese nalivno pero
Šifra kandidata: Srednja elektro šola in tehniška gimnazija ELEKTROTEHNIKA PISNA IZPITNA POLA 1 12. junij 2013 Čas pisanja 40 minut Dovoljeno dodatno gradivo in pripomočki: Kandidat prinese nalivno pero
Filter za plin SL Navodila za vgradnjo Stran 2
 Filter za plin SL Navodila za vgradnjo Stran 2 Filter za plin Kazalo Uporabljeni simboli... 2 Varnostna navodila... 2 Namen uporabe... 3 Navodila za vgradnjo Vgradnja filtra za plin... 5 Vgradnja brez
Filter za plin SL Navodila za vgradnjo Stran 2 Filter za plin Kazalo Uporabljeni simboli... 2 Varnostna navodila... 2 Namen uporabe... 3 Navodila za vgradnjo Vgradnja filtra za plin... 5 Vgradnja brez
SLO - NAVODILO ZA UPORABO IN MONTAŽO Št
 SLO - NAVODILA ZA UPORABO IN MONTAŽO Kat. št.: 77 93 47 www.conrad.si NAVODILA ZA UPORABO Tester zavorne tekočine SecoRüt RSDOT Kataloška št.: 77 93 47 Ta navodila za uporabo sodijo k temu izdelku. Vsebujejo
SLO - NAVODILA ZA UPORABO IN MONTAŽO Kat. št.: 77 93 47 www.conrad.si NAVODILA ZA UPORABO Tester zavorne tekočine SecoRüt RSDOT Kataloška št.: 77 93 47 Ta navodila za uporabo sodijo k temu izdelku. Vsebujejo
1. Distributivni elementi.indd
 Kompaktna klimatska naprava SMRTY / 119 Tehnični list Namestitev: Stanovanja, Stanovanjske hiše, Vile, Pasivne hiše Prezračevalna naprava za stanovanjske hiše Smarty X z EPP ohišjem je sinonim za najvišjo
Kompaktna klimatska naprava SMRTY / 119 Tehnični list Namestitev: Stanovanja, Stanovanjske hiše, Vile, Pasivne hiše Prezračevalna naprava za stanovanjske hiše Smarty X z EPP ohišjem je sinonim za najvišjo
Microsoft Word doc
 SLO - NAVODILO ZA NAMESTITEV IN UPORABO Št. izd. : 973911 www.conrad.si OJAČEVALNIK SIGNALA NETGEAR WN2000RPT Št. izdelka: 973911 1 KAZALO 1 OBSEG DOBAVE... 3 2 LED PRIKAZI OJAČEVALNIKA SIGNALA... 3 3
SLO - NAVODILO ZA NAMESTITEV IN UPORABO Št. izd. : 973911 www.conrad.si OJAČEVALNIK SIGNALA NETGEAR WN2000RPT Št. izdelka: 973911 1 KAZALO 1 OBSEG DOBAVE... 3 2 LED PRIKAZI OJAČEVALNIKA SIGNALA... 3 3
PowerPoint Presentation
 Lasersko obarvanje kovin Motivacija: Z laserskim obsevanjem je možno spremeniti tudi barvo kovinskih površin, kar odpira povsem nove možnosti označevanja in dekoracije najrazličnejših sestavnih delov in
Lasersko obarvanje kovin Motivacija: Z laserskim obsevanjem je možno spremeniti tudi barvo kovinskih površin, kar odpira povsem nove možnosti označevanja in dekoracije najrazličnejših sestavnih delov in
Diapozitiv 1
 Vhodno izhodne naprave Laboratorijska vaja 4 - AV 4 Linije LTSpice, simulacija elektronskih vezij VIN - LV 1 Rozman,Škraba, FRI LTSpice LTSpice: http://www.linear.com/designtools/software/ https://www.analog.com/en/design-center/design-tools-andcalculators/ltspice-simulator.html
Vhodno izhodne naprave Laboratorijska vaja 4 - AV 4 Linije LTSpice, simulacija elektronskih vezij VIN - LV 1 Rozman,Škraba, FRI LTSpice LTSpice: http://www.linear.com/designtools/software/ https://www.analog.com/en/design-center/design-tools-andcalculators/ltspice-simulator.html
Microsoft Word doc
 SLO - NAVODILO ZA NAMESTITEV IN UPORABO Št. izd. : 510834 www.conrad.si ADAPTER 206 ZA MAJHNE AVTOMOBI LSKE PORABNIKE, STABILIZIRAN Št. izdelka: 510834 1 KAZALO 1 UVOD... 3 2 NAMEN UPORABE... 4 3 ELEMENTI...
SLO - NAVODILO ZA NAMESTITEV IN UPORABO Št. izd. : 510834 www.conrad.si ADAPTER 206 ZA MAJHNE AVTOMOBI LSKE PORABNIKE, STABILIZIRAN Št. izdelka: 510834 1 KAZALO 1 UVOD... 3 2 NAMEN UPORABE... 4 3 ELEMENTI...
Sistemi Daljinskega Vodenja Vaja 3 Matej Kristan Laboratorij za Strojni Vid Fakulteta za elektrotehniko, Univerza v Ljubl
 Sistemi Daljinskega Vodenja Vaja 3 Matej Kristan Laboratorij za Strojni Vid Fakulteta za elektrotehniko, Univerza v Ljubljani matej.kristan@fe.uni-lj.si Česa smo se naučili
Sistemi Daljinskega Vodenja Vaja 3 Matej Kristan Laboratorij za Strojni Vid Fakulteta za elektrotehniko, Univerza v Ljubljani matej.kristan@fe.uni-lj.si Česa smo se naučili
DCS-2330L_A1_QIG_v1.00(EU).indd
.indd") HD WIRELESS N OUTDOOR CLOUD CAMERA DCS-2330L KRATKA NAVODILA ZA UPORABO VSEBINA PAKETA HD WIRELESS N OUTDOOR CLOUD CAMERA DCS-2330L NAPAJALNI ADAPTER ADAPTER ETHERNET KABEL (CAT5 UTP) MED POSTAVITVIJO,
HD WIRELESS N OUTDOOR CLOUD CAMERA DCS-2330L KRATKA NAVODILA ZA UPORABO VSEBINA PAKETA HD WIRELESS N OUTDOOR CLOUD CAMERA DCS-2330L NAPAJALNI ADAPTER ADAPTER ETHERNET KABEL (CAT5 UTP) MED POSTAVITVIJO,
Microsoft Word - CNR-MPV2 Quick Guide_SI
 Canyon multimedijski MP3 predvajalnik Artikel: CNR-MPV2 Opozorilo: Pred uporabo pozorno preberite navodila za uporabo. Podrobna navodila se nahajajo na priloženem CD mediju. Opozorilo: Pred uporabo napolnite
Canyon multimedijski MP3 predvajalnik Artikel: CNR-MPV2 Opozorilo: Pred uporabo pozorno preberite navodila za uporabo. Podrobna navodila se nahajajo na priloženem CD mediju. Opozorilo: Pred uporabo napolnite
untitled
 BREMENSKE JEKLENE VRVI kakovostnega razreda 5, izdelani po EN 131 v izvedbi z 1, 2, 3 ali stremeni NAVODILO ZA UPORABO Ta navodila naj pazljivo preberejo vsi uporabniki. Olajšala vam bodo delo s stroji
BREMENSKE JEKLENE VRVI kakovostnega razreda 5, izdelani po EN 131 v izvedbi z 1, 2, 3 ali stremeni NAVODILO ZA UPORABO Ta navodila naj pazljivo preberejo vsi uporabniki. Olajšala vam bodo delo s stroji
Navodila za programsko opremo FeriX Namestitev na trdi disk Avtor navodil: Martin Terbuc Datum: December 2007 Center odprte kode Slovenije Spletna str
 Navodila za programsko opremo FeriX Namestitev na trdi disk Avtor navodil: Martin Terbuc Datum: December 2007 Center odprte kode Slovenije Spletna stran: http://www.coks.si/ Elektronski naslov: podpora@coks.si
Navodila za programsko opremo FeriX Namestitev na trdi disk Avtor navodil: Martin Terbuc Datum: December 2007 Center odprte kode Slovenije Spletna stran: http://www.coks.si/ Elektronski naslov: podpora@coks.si
ErgoPack ergonomsko povezovanje palet
 ErgoPack ergonomsko povezovanje palet Postavite ErgoPack pred paleto. Verižna sablja potegne trak spodaj pod paleto ErgoPack sistem Z ErgoPack-om boste sprejeli pravilno odločitev! Velike, male, široke,
ErgoPack ergonomsko povezovanje palet Postavite ErgoPack pred paleto. Verižna sablja potegne trak spodaj pod paleto ErgoPack sistem Z ErgoPack-om boste sprejeli pravilno odločitev! Velike, male, široke,
IMP Klima Enote za regulacijo zraka Regulacijske žaluzije Regulacijske žaluzije PREZRAČEVALNE REŠETKE IN VENTILI Regulacijske žaluzije RŽ-1, RŽ-2, RŽ-
 RŽ-1, RŽ-2, RŽ-3 Uporaba so namenjene za regulacijo pretoka zraka in tlaka v prezračevalnih kanalih in klima napravah. Lahko jih vgrajujemo samostojno ali v kombinaciji s zaščitnimi ali nadtlačnimi rešetkami.
RŽ-1, RŽ-2, RŽ-3 Uporaba so namenjene za regulacijo pretoka zraka in tlaka v prezračevalnih kanalih in klima napravah. Lahko jih vgrajujemo samostojno ali v kombinaciji s zaščitnimi ali nadtlačnimi rešetkami.
SLO - NAVODILO ZA UPORABO IN MONTAŽO Št
 SLO - NAVODILA ZA UPORABO IN MONTAŽO Kat. št.: 58 86 58 www.conrad.si NAVODILA ZA UPORABO Spajkalna postaja digitalna 80 W Ersa i- CON pico +150 do +450 C Kataloška št.: 58 86 58 Kazalo 1. Dodatki. 2 2.
SLO - NAVODILA ZA UPORABO IN MONTAŽO Kat. št.: 58 86 58 www.conrad.si NAVODILA ZA UPORABO Spajkalna postaja digitalna 80 W Ersa i- CON pico +150 do +450 C Kataloška št.: 58 86 58 Kazalo 1. Dodatki. 2 2.
Microsoft PowerPoint - Lapajne&Randl2015.pptx
 RAZISKAVA OB PREDVIDENI SELITVI KNJIŽNIC OHK Raziskava je potekala v okviru predmetov Raziskovalne metode in Uporabniki informacijskih virov in storitev pod mentorstvom treh profesorjev (dr. Pisanski,
RAZISKAVA OB PREDVIDENI SELITVI KNJIŽNIC OHK Raziskava je potekala v okviru predmetov Raziskovalne metode in Uporabniki informacijskih virov in storitev pod mentorstvom treh profesorjev (dr. Pisanski,
Šolski center celje
 ŠOLSKI CENTER CELJE Gimnazija Lava DVORIŠČNA VRATA NA DALJINSKO UPRAVLJANJE MENTOR: Matjaž Cizej, univ. dipl. inž. AVTOR: Roman Leban, L-4.F Celje, marec 2010 KAZALO VSEBINE 1 POVZETEK /SUMMARY... 1 2
ŠOLSKI CENTER CELJE Gimnazija Lava DVORIŠČNA VRATA NA DALJINSKO UPRAVLJANJE MENTOR: Matjaž Cizej, univ. dipl. inž. AVTOR: Roman Leban, L-4.F Celje, marec 2010 KAZALO VSEBINE 1 POVZETEK /SUMMARY... 1 2