Robotski manipulator Gibanje zgornje lege prijemala
|
|
|
- Erna Rus
- pred 2 leti
- Pregledov:
Transkripcija


1 Gibanje zgornje lege prijemala Gibanje od točke do točke (PTP Point to Point)

2 Gibanje zgornje lege prijemala Linearno gibanje (LIN Linear)
")
3 Gibanje zgornje lege prijemala Krožno gibanje (CIRC Circular)
4 Delovni prostor Pri robotizaciji neke delovne naloge je zelo pomembna študija delovnega prostora. Delovni prostor robotskega manipulatorja predstavljajo vse točke v prostoru, ki jih vrh robota lahko doseže. Delovni prostori se od robota do robota razlikujejo (velikost in oblika) Pri robotizaciji se srečujemo z dvema vrstama nalog: - poznamo robota in moramo določiti njegov delovni prostor ali - poznamo delovni prostor in moramo določiti robota (nakup novega) Za industrijske robote na splošno velja, da bo delovni prostor tem večji, čim večje bodo dimenzije posameznih segmentov in da bo priročni delovni prostor tem večji, čim krajši bo zadnji segment. Priročni prostor prostor v katerem robotski manipulator doseže vsako točko s poljubno orientacijo prijemala (tem večji čim krajši je zadnji segment).
5 Tipični tehnični podatki proizvajalcev Maksimalna obremenitev - masa (kg) - navor (Nm) - vztrajnostni moment (kg m2) - potisk (N) Maksimalna hitrost (mm/s ali /s) Ločljivost gibanja posamezne prostostne stopnje (mm ali ) Ločljivost gibanja vrha manipulatorja Ponovljivost Natančnost
6 Točnost in ponovljivost
7 Kalibracija / umerjanje osi robotskega manipulatorja Ponastavitev inkrementalnih dajalnikov pozicije posameznih osi robotskega manipulatorja ima tovarniško izvedene nastavitve, ki zagotavljajo specificirano natančnost. Ob prvi instalaciji manipulatorja je potrebno obvezno preveriti in popraviti vnose (tovarniški zapis se ponavadi nahaja na hrbtni strani pokrova robotskega manipulatorja) Načini kalibracije (umerjanja): - Programski vnos (ponastavitev tovarniških ali zadnjih uporabnikovih podanih vrednost)
8 Kalibracija / umerjanje osi robotskega manipulatorja - Metoda končne lege robotske roke (mechanical stopper)
9 Kalibracija / umerjanje osi robotskega manipulatorja - Metoda umirjanja s pomočjo kalibrirne palice
10 Kalibracija / umerjanje osi robotskega manipulatorja - Metoda umirjanja z uporabo oznak (ABS)
11 Vzdrževanje Plan pregledov je časovno opredeljen (vsakih 500 delovnih ur) Dnevni pregledi: - pričvrščenost vijakov - tesnost (madeži maziva) - razpoke v strukturi - nenavadne vibracije in zvoki ob delovanju - kontrola kabelskih povezav (med kontrolerjem in robotskim manipulatorjem) 3-m Periodični pregledi - ustrezna napetost jermenic 6-m Periodični pregledi - obraba jermenic in zamenjava po potrebi 12-m Periodični pregledi - menjava akumulatorskih backup baterij - test ponovljivosti - kontrola delovanja zavor 36-m Periodični pregledi - mazanje reduktorskih sklopov osi

12 Vzdrževanje Redna obnova robotskega manipulatorja ur menjava sklopov robotske roke ur menjava krmilnika
13 Robotske roke - tipi Osi dveh sosednjih sklepov robotske roke sta lahko bodisi vzporedni ali pravokotni. Ker ima roka tri prostostne stopnje, imamo na voljo 36 različnih robotski rok, med njimi pa je le 12 zares matematično različnih. V praktičnih izvedbah pa najdemo le 5 različnih rok: - antropomorfna robotska roka - sferična robotska roka - SCARA robotska roka - cilindrična robotska roka - kartezična robotska roka
 3 translacijski sklepi (vse osi")
 Pomik vseh osi hkrati")
14 Kartezična robotska roka Najpreprostejša izvedba (lažje krmiljenje) 3 translacijski sklepi (vse osi med seboj pravokotne) Visoka točnost, prenos težkih bremen (stropna oblika) Pomik vseh osi hkrati linearni pomik

15 Kartezična robotska roka Delovni prostor je kvader
16 Kartezična robotska roka Kinematika x = k y = r z = h k r Inverzna kinematika h k = x r = y h = z



17 Cilindrična robotska roka Ena rotacijska in dve translacijski prostostni stopnji. Os drugega sklepa je vzporedna s prvo osjo, os tretjega sklepa pa je pravokotna na drugo. Večji delovni prostor kot kartezična r.r. Pick and Place operacije Rotacijski sklep zmanjšuje ponovljivost in natančnost v primerjavi s kart. r.r.
18 Cilindrična robotska roka Kinematika x = r cos φ y = r sin φ z = h Inverzna kinematika r = x 2 + y 2 φ = arctan y x z = h


19 Sferična (polarna) robotska roka Dve rotacijski in ena translacijska prostostna stopnja. Os drugega sklepa je pravokotna na prvo os, os tretjega sklepa pa pravokotna na drugo os. Delovni prostor, ki ga lahko doseže vrh manipulatorja, je podoben krogli Večji delovni prostor kot kartezična in cilindrična r.r. Preprostejša zasnova, dvigovanje težkih bremen Primerna kjer ni potreben velik vertikalni pomik
20 Sferična (polarna) robotska roka Kinematika r = r sin θ x = r sin θ cos φ y = r sin θ sin φ z = a + r cos θ Inverzna kinematika r = x 2 + y 2 + z a 2 φ = arctan y x θ = arctan x 2 +y 2 z a


21 SCARA robotska roka Selective Compliant Articulated Robot for Assembly Namenjen predvsem procesom montaže Dva sklepa sta rotacijska in en translacijski. Osi vseh treh sklepov so vzporedne Delovni prostor SCARA robota je podoben valju
22 SCARA robotska roka Kinematika x = a cos φ 1 + b cos φ 1 + φ 2 y = a sin φ 1 + b sin φ 1 + φ 2 z = h Inverzna kinematika h = z φ 2 = + arccos x2 + y 2 a 2 b 2 2ab φ 1 = arctan y x arctan b sin φ 2 a + b cos φ 2


23 Antropomorfna robotska roka Najpogostejša izvedba 3 rotacijski sklepi (druga os je pravokotna na prvo in tretja os vzporedna z drugo) Število notranjih spremenljivk je enako številu prostostnih stopenj robotskega mehanizma in tudi številu sklepov robota.
24 Antropomorfna robotska roka Kinematika c, = a sin θ 1 + b sin θ 1 + θ 2 x = c, cos φ y = c, sin φ z = H + a cos θ 1 + b cos θ 1 + θ 2 Inverzna kinematika φ = arctan y x θ 2 = + arccos x2 + y 2 + z H 2 a 2 b 2 2ab θ 1 = π 2 arctan z H x 2 + y 2 + arccos a + b cos θ 2 a 2 + b 2 + 2ab cos θ 2

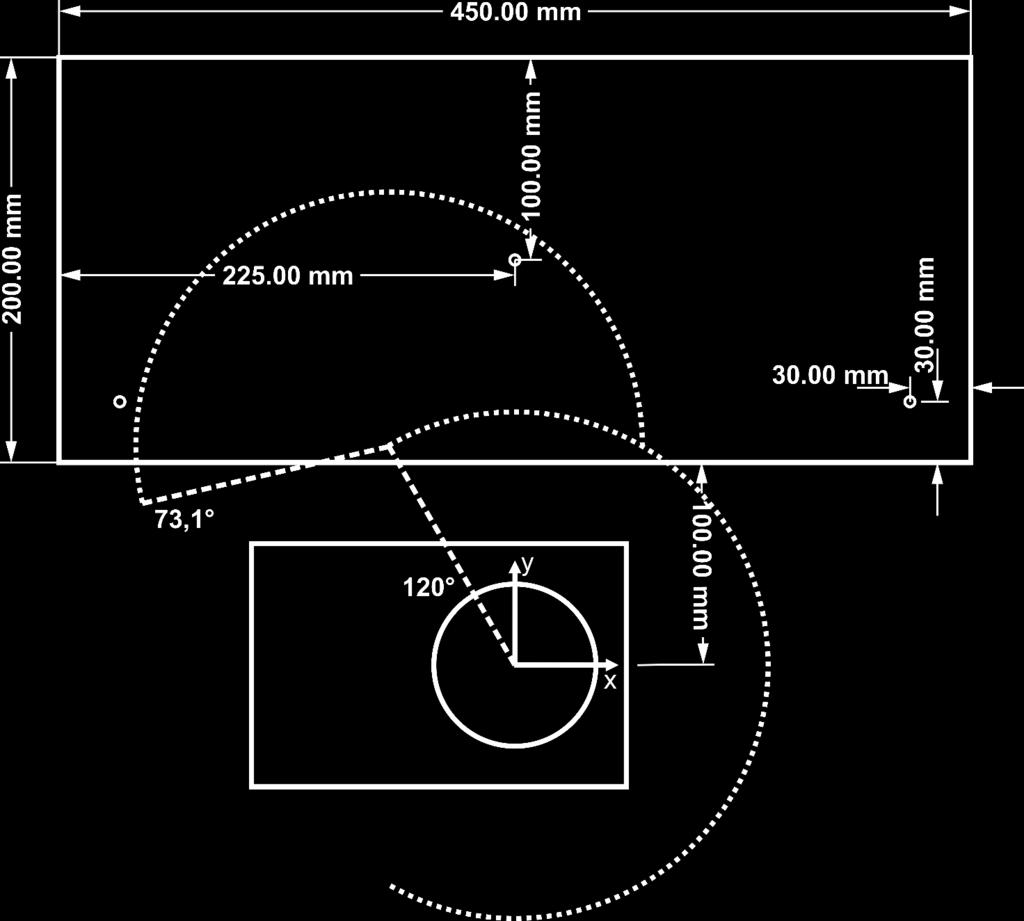
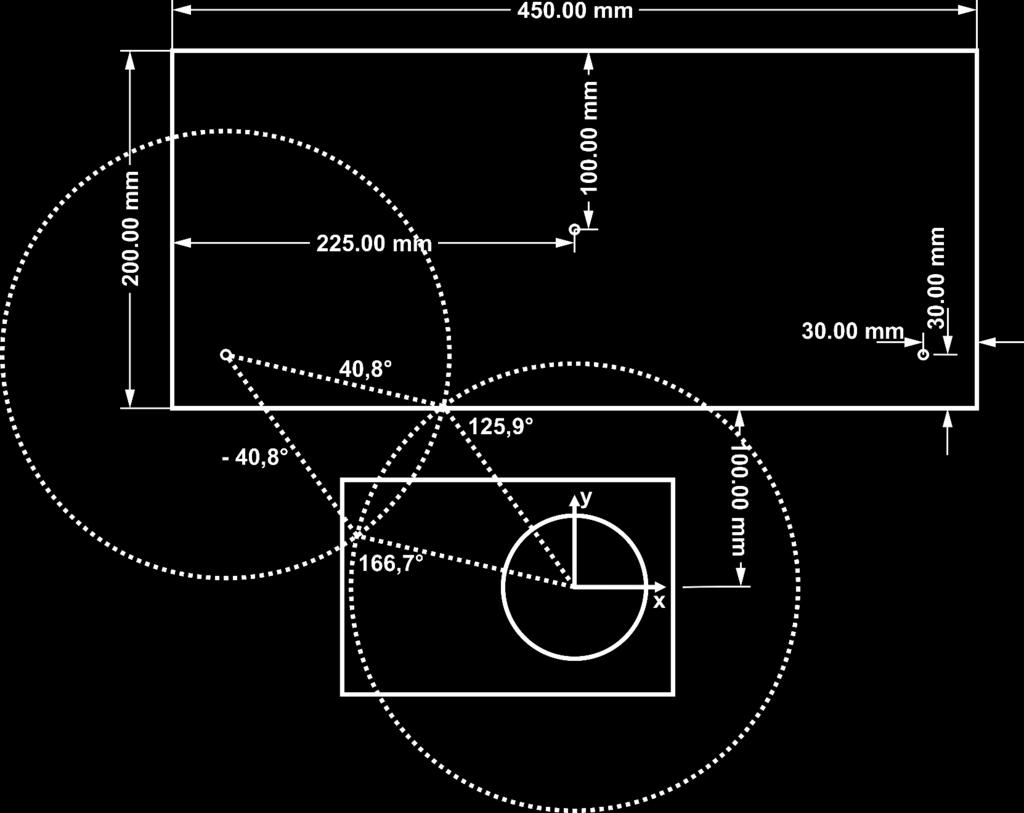
25 Naloga 1 Podjetje ima v lasti SCARA model (IX-NNN2515) robotskega manipulatorja, proizvajalca IAI. V podjetju želijo uporabiti obstoječi manipulator za novi proizvodni proces. Pri tem bo potrebno uporabiti novo prijemalo teže 500g. Izdelek, ki ga bi moral manipulator obdelovati je pravokotna plošča dimenzij 200mm x 450mm x 3mm. Manipulator mora izvrtati 3 luknje, katerih pozicija je prikazana na sliki. Ali je glede na specifikacije robotski manipulator možno uporabiti za to nalogo? Na kakšni maksimalni višini od izhodiščnega k.s. SCARA manipulatorja lahko postavimo ploščo, da bo še možno izvesti proces? 30mm 100mm 30mm 225mm 200mm 100mm base coordinate system y x 450mm

26 Naloga 1
27 Naloga 1
28 Naloga 1
29 Naloga 1
30 Naloga 2 Antropomorfna robotska roka ima nalogo prenašati izdelek iz točke A v točko B. Kolikšne so notranje koordinate oz. za koliko se notranje koordinate spremenijo pri pomiku iz točke A v točko B? H = 50cm a = b = 100cm A 60,60,40 cm B 80, 80,50 cm
31 Robotski sestav Vprašanja 1.) Robotski sestav osnovne komponente (5) ter funkcionalna razlaga 2.) - osnovne komponente (5) ter funkcionalna razlaga 3.) Definicija prijemala 4.) Definicija zapestja 5.) Prostostne stopnje (opis) 6.) Naloga robotske roke ter zapestja 7.) Redundantnost robotskega manipulatorja 8.) Razlaga direktne in inverzne kinematike 9.) Koordinatni sistemi robotskega manipulatorja 10.) Gibanje lege prijemala (razlaga delovanja robotskega manipulatorja ob delovni hitrosti gibanje med točkami) 11.) Delovni prostor definicija 12.) Tipični tehnični podatki proizvajalca 13.) Razloži pojma točnosti in ponovljivosti robotskega manipulatorja 14.) Kdaj in zakaj potrebujemo kalibracijo robotskega manipulatorja 15.) Vzdrževalni cikel robotskega manipulatorja
32 Robotski sestav Vprašanja 16.) Glede na kaj so definirane robotske roke? 17.) Naštej tipe robotskih rok 18.) Opis kartezične robotske roke (delovni prostor, sestav in orientacija sklepov) 19.) Opis cilindrične robotske roke (delovni prostor, sestav in orientacija sklepov) 20.) Opis polarne robotske roke (delovni prostor, sestav in orientacija sklepov) 21.) Opis SCARA robotske roke (delovni prostor, sestav in orientacija sklepov) 22.) Opis antropomorfne robotske roke (delovni prostor, sestav in orientacija sklepov)
Microsoft Word - ABB Robotski sistem za varjene osnove kontejnerja ASM-13.doc
 Posvet AVTOMATIZACIJA STREGE IN MONTAŽE 2013 Ljubljana, 4.december 2013 ABB ROBOTSKI SISTEM ZA VARJENJE OSNOVE KONTEJNERJA, Robert LOGAR POVZETEK Robotski sistemi se pogosteje uporabljajo za izdelavo izdelkov
Posvet AVTOMATIZACIJA STREGE IN MONTAŽE 2013 Ljubljana, 4.december 2013 ABB ROBOTSKI SISTEM ZA VARJENJE OSNOVE KONTEJNERJA, Robert LOGAR POVZETEK Robotski sistemi se pogosteje uporabljajo za izdelavo izdelkov
CpE & ME 519
 2D Transformacije Zakaj potrebujemo transformacije? Animacija Več instanc istega predmeta, variacije istega objekta na sceni Tvorba kompliciranih predmetov iz bolj preprostih Transformacije gledanja Kaj
2D Transformacije Zakaj potrebujemo transformacije? Animacija Več instanc istega predmeta, variacije istega objekta na sceni Tvorba kompliciranih predmetov iz bolj preprostih Transformacije gledanja Kaj
Fakulteta za elektrotehniko, računalništvo in informatiko Smetanova ulica Maribor, Slovenija Gregor Blatnik PREIZKUŠANJE VZDRŢLJIVOSTI ROČNIH
 Fakulteta za elektrotehniko, računalništvo in informatiko Smetanova ulica 17 2000 Maribor, Slovenija Gregor Blatnik PREIZKUŠANJE VZDRŢLJIVOSTI ROČNIH MEŠALNIKOV S POMOČJO INDUSTRIJSKEGA ROBOTA Magistrsko
Fakulteta za elektrotehniko, računalništvo in informatiko Smetanova ulica 17 2000 Maribor, Slovenija Gregor Blatnik PREIZKUŠANJE VZDRŢLJIVOSTI ROČNIH MEŠALNIKOV S POMOČJO INDUSTRIJSKEGA ROBOTA Magistrsko
Microsoft Word - CNC obdelava kazalo vsebine.doc
 ŠOLSKI CENTER NOVO MESTO VIŠJA STROKOVNA ŠOLA STROJNIŠTVO DIPLOMSKA NALOGA Novo mesto, april 2008 Ime in priimek študenta ŠOLSKI CENTER NOVO MESTO VIŠJA STROKOVNA ŠOLA STROJNIŠTVO DIPLOMSKA NALOGA Novo
ŠOLSKI CENTER NOVO MESTO VIŠJA STROKOVNA ŠOLA STROJNIŠTVO DIPLOMSKA NALOGA Novo mesto, april 2008 Ime in priimek študenta ŠOLSKI CENTER NOVO MESTO VIŠJA STROKOVNA ŠOLA STROJNIŠTVO DIPLOMSKA NALOGA Novo
Univerza v Novi Gorici Fakulteta za aplikativno naravoslovje Fizika (I. stopnja) Mehanika 2014/2015 VAJE Gravitacija - ohranitveni zakoni
 Mehanika 2014/2015 VAJE Gravitacija - ohranitveni zakoni") Univerza v Novi Gorici Fakulteta za aplikativno naravoslovje Fizika (I. stopnja) Mehanika 2014/2015 VAJE 12. 11. 2014 Gravitacija - ohranitveni zakoni 1. Telo z maso M je sestavljeno iz dveh delov z masama
Univerza v Novi Gorici Fakulteta za aplikativno naravoslovje Fizika (I. stopnja) Mehanika 2014/2015 VAJE 12. 11. 2014 Gravitacija - ohranitveni zakoni 1. Telo z maso M je sestavljeno iz dveh delov z masama
GRADIVO ROBOTIKA
 gml.c MEHATRONIKA JE POKLIC PRIHODNOSTI Andro Glamnik, univ. dipl. inž. Matej Veber, univ. dipl. inž. www.bodiprofi.si Uvajanje novih izobraževalnih programov v srednjem poklicnem in strokovnem izobraževanju
gml.c MEHATRONIKA JE POKLIC PRIHODNOSTI Andro Glamnik, univ. dipl. inž. Matej Veber, univ. dipl. inž. www.bodiprofi.si Uvajanje novih izobraževalnih programov v srednjem poklicnem in strokovnem izobraževanju
10108-Bench-mark-brochure-6pg.indd
 Unikatna konstrukcija mostu Kompaktna izvedba O podjetju Perceptron: Temperaturna kompenzacija stroja in merjenca (opcijsko) X in Y osi na isti stopnji za povečano togost Perceptron (NASDAQ: PRCP) zagotavlja
Unikatna konstrukcija mostu Kompaktna izvedba O podjetju Perceptron: Temperaturna kompenzacija stroja in merjenca (opcijsko) X in Y osi na isti stopnji za povečano togost Perceptron (NASDAQ: PRCP) zagotavlja
ANALITIČNA GEOMETRIJA V RAVNINI
 3. Analitična geometrija v ravnini Osnovna ideja analitične geometrije je v tem, da vaskemu geometrijskemu objektu (točki, premici,...) pridružimo števila oz koordinate, ki ta objekt popolnoma popisujejo.
3. Analitična geometrija v ravnini Osnovna ideja analitične geometrije je v tem, da vaskemu geometrijskemu objektu (točki, premici,...) pridružimo števila oz koordinate, ki ta objekt popolnoma popisujejo.
Microsoft Word - Pravila - AJKTM 2016.docx
 PRAVILA ALI JE KAJ TRDEN MOST 2016 3. maj 5. maj 2016 10. 4. 2016 Maribor, Slovenija 1 Osnove o tekmovanju 1.1 Ekipa Ekipa sestoji iz treh članov, ki so se po predhodnem postopku prijavili na tekmovanje
PRAVILA ALI JE KAJ TRDEN MOST 2016 3. maj 5. maj 2016 10. 4. 2016 Maribor, Slovenija 1 Osnove o tekmovanju 1.1 Ekipa Ekipa sestoji iz treh članov, ki so se po predhodnem postopku prijavili na tekmovanje
C:/Users/Matevž Èrepnjak/Dropbox/FKKT/testi in izpiti/ /IZPITI/FKKT-februar-14.dvi
 Kemijska tehnologija, Kemija Bolonjski univerzitetni program Smer: KT K WolframA: DA NE Računski del izpita pri predmetu MATEMATIKA I 6. 2. 2014 Čas reševanja je 75 minut. Navodila: Pripravi osebni dokument.
Kemijska tehnologija, Kemija Bolonjski univerzitetni program Smer: KT K WolframA: DA NE Računski del izpita pri predmetu MATEMATIKA I 6. 2. 2014 Čas reševanja je 75 minut. Navodila: Pripravi osebni dokument.
Osnove matematicne analize 2018/19
 Osnove matematične analize 2018/19 Neža Mramor Kosta Fakulteta za računalništvo in informatiko Univerza v Ljubljani Funkcija je predpis, ki vsakemu elementu x iz definicijskega območja D f R priredi natanko
Osnove matematične analize 2018/19 Neža Mramor Kosta Fakulteta za računalništvo in informatiko Univerza v Ljubljani Funkcija je predpis, ki vsakemu elementu x iz definicijskega območja D f R priredi natanko
Vrste
 Matematika 1 17. - 24. november 2009 Funkcija, ki ni algebraična, se imenuje transcendentna funkcija. Podrobneje si bomo ogledali naslednje transcendentne funkcije: eksponentno, logaritemsko, kotne, ciklometrične,
Matematika 1 17. - 24. november 2009 Funkcija, ki ni algebraična, se imenuje transcendentna funkcija. Podrobneje si bomo ogledali naslednje transcendentne funkcije: eksponentno, logaritemsko, kotne, ciklometrične,
Microsoft PowerPoint - 3_MACS+_Pozarni_testi_slo.ppt [Compatibility Mode]
![Microsoft PowerPoint - 3_MACS+_Pozarni_testi_slo.ppt [Compatibility Mode]](/thumbs/101/150629752.jpg "Microsoft PowerPoint - 3_MACS+_Pozarni_testi_slo.ppt [Compatibility Mode]") Obnašanje jeklenih in sovprežnih stropnih konstrukcij v požaru Vsebina novih požarnih testov Izvedeni so bili požarni preizkusi v okviru projektov FRACOF (ISO požar) COSSFIRE (ISO požar) FICEB (Naravni
Obnašanje jeklenih in sovprežnih stropnih konstrukcij v požaru Vsebina novih požarnih testov Izvedeni so bili požarni preizkusi v okviru projektov FRACOF (ISO požar) COSSFIRE (ISO požar) FICEB (Naravni
Vektorji - naloge za test Naloga 1 Ali so točke A(1, 2, 3), B(0, 3, 7), C(3, 5, 11) b) A(0, 3, 5), B(1, 2, 2), C(3, 0, 4) kolinearne? Naloga 2 Ali toč
, B(0, 3, 7), C(3, 5, 11) b) A(0, 3, 5), B(1, 2, 2), C(3, 0, 4) kolinearne? Naloga 2 Ali toč") Vektorji - naloge za test Naloga 1 li so točke (1, 2, 3), (0, 3, 7), C(3, 5, 11) b) (0, 3, 5), (1, 2, 2), C(3, 0, 4) kolinearne? Naloga 2 li točke a) (6, 0, 2), (2, 0, 4), C(6, 6, 1) in D(2, 6, 3), b)
Vektorji - naloge za test Naloga 1 li so točke (1, 2, 3), (0, 3, 7), C(3, 5, 11) b) (0, 3, 5), (1, 2, 2), C(3, 0, 4) kolinearne? Naloga 2 li točke a) (6, 0, 2), (2, 0, 4), C(6, 6, 1) in D(2, 6, 3), b)
Napotki za izbiro gibljivih verig Stegne 25, 1000 Ljubljana, tel: , fax:
 Napotki za izbiro gibljivih verig Postopek za izbiro verige Vrsta gibanja Izračun teže instalacij Izbira verige glede na težo Hod verige Dolžina verige Radij verige Hitrost in pospešek gibanja Instalacije
Napotki za izbiro gibljivih verig Postopek za izbiro verige Vrsta gibanja Izračun teže instalacij Izbira verige glede na težo Hod verige Dolžina verige Radij verige Hitrost in pospešek gibanja Instalacije
(Slovenian) DM-HB Navodila za trgovce CESTNO MTB Treking Mestno izletniško/ udobno kolo URBANO ŠPORTNO E-BIKE HB-M3050 FH-M3050 HB-MT200 FH-MT2
 DM-HB Navodila za trgovce CESTNO MTB Treking Mestno izletniško/ udobno kolo URBANO ŠPORTNO E-BIKE HB-M3050 FH-M3050 HB-MT200 FH-MT2") (Slovenian) DM-HB0005-04 Navodila za trgovce CESTNO MTB Treking Mestno izletniško/ udobno kolo URBANO ŠPORTNO E-BIKE HB-M3050 FH-M3050 HB-MT200 FH-MT200-B HB-RM33 FH-RM33 FH-RM35 HB-TX505 FH-TX505 Prednje
(Slovenian) DM-HB0005-04 Navodila za trgovce CESTNO MTB Treking Mestno izletniško/ udobno kolo URBANO ŠPORTNO E-BIKE HB-M3050 FH-M3050 HB-MT200 FH-MT200-B HB-RM33 FH-RM33 FH-RM35 HB-TX505 FH-TX505 Prednje
Matematika 2
 Matematika 2 Gregor Dolinar Fakulteta za elektrotehniko Univerza v Ljubljani 23. april 2014 Soda in liha Fourierjeva vrsta Opomba Pri razvoju sode periodične funkcije f v Fourierjevo vrsto v razvoju nastopajo
Matematika 2 Gregor Dolinar Fakulteta za elektrotehniko Univerza v Ljubljani 23. april 2014 Soda in liha Fourierjeva vrsta Opomba Pri razvoju sode periodične funkcije f v Fourierjevo vrsto v razvoju nastopajo
AME 110 NL / AME 120 NL
 Pogoni za zvezni regulacijski signal AME 110 NL, AME 120 NL Opis Ti pogoni se uporabljajo skupaj z kombiniranimi avtomatskimi omejevalniki pretoka z regulacijskim ventilom AB-QM DN 10 - DN 32. Ta pogon
Pogoni za zvezni regulacijski signal AME 110 NL, AME 120 NL Opis Ti pogoni se uporabljajo skupaj z kombiniranimi avtomatskimi omejevalniki pretoka z regulacijskim ventilom AB-QM DN 10 - DN 32. Ta pogon
1 Tekmovanje gradbenih tehnikov v izdelavi mostu iz špagetov 1.1 Ekipa Ekipa sestoji iz treh članov, ki jih mentor po predhodni izbiri prijavi na tekm
 1 Tekmovanje gradbenih tehnikov v izdelavi mostu iz špagetov 1.1 Ekipa Ekipa sestoji iz treh članov, ki jih mentor po predhodni izbiri prijavi na tekmovanje. Končni izdelek mora biti produkt lastnega dela
1 Tekmovanje gradbenih tehnikov v izdelavi mostu iz špagetov 1.1 Ekipa Ekipa sestoji iz treh članov, ki jih mentor po predhodni izbiri prijavi na tekmovanje. Končni izdelek mora biti produkt lastnega dela
IR grelni paneli BASIC serije - IR grelni panel BASIC 500W Redna cena: 359,10 brez DDV Cena z 15 % popustom: 305,24 brez DDV Integriran brezžični spre
 IR grelni paneli BASIC serije - IR grelni panel BASIC 500W Redna cena: 359,10 brez DDV Cena z 15 % popustom: 305,24 brez DDV Opcija: Alu. okvir in površina panela v izbrani barvi Dimenzija: 60 60 3,5 cm
IR grelni paneli BASIC serije - IR grelni panel BASIC 500W Redna cena: 359,10 brez DDV Cena z 15 % popustom: 305,24 brez DDV Opcija: Alu. okvir in površina panela v izbrani barvi Dimenzija: 60 60 3,5 cm
C:/Users/Matevž Èrepnjak/Dropbox/FKKT/TESTI-IZPITI-REZULTATI/ /Izpiti/FKKT-avgust-17.dvi
 Vpisna številka Priimek, ime Smer: K KT WA Izpit pri predmetu MATEMATIKA I Računski del Ugasni in odstrani mobilni telefon. Uporaba knjig in zapiskov ni dovoljena. Dovoljeni pripomočki so: kemični svinčnik,
Vpisna številka Priimek, ime Smer: K KT WA Izpit pri predmetu MATEMATIKA I Računski del Ugasni in odstrani mobilni telefon. Uporaba knjig in zapiskov ni dovoljena. Dovoljeni pripomočki so: kemični svinčnik,
6.1 Uvod 6 Igra Chomp Marko Repše, Chomp je nepristranska igra dveh igralcev s popolno informacijo na dvo (ali vec) dimenzionalnem prostoru
 dimenzionalnem prostoru") 6.1 Uvod 6 Igra Chomp Marko Repše, 30.03.2009 Chomp je nepristranska igra dveh igralcev s popolno informacijo na dvo (ali vec) dimenzionalnem prostoru in na končni ali neskončni čokoladi. Igralca si izmenjujeta
6.1 Uvod 6 Igra Chomp Marko Repše, 30.03.2009 Chomp je nepristranska igra dveh igralcev s popolno informacijo na dvo (ali vec) dimenzionalnem prostoru in na končni ali neskončni čokoladi. Igralca si izmenjujeta
FAKULTETA ZA STROJNIŠTVO Matematika 2 Pisni izpit 9. junij 2005 Ime in priimek: Vpisna št: Zaporedna številka izpita: Navodila Pazljivo preberite bese
 FAKULTETA ZA STROJNIŠTVO Matematika Pisni izpit 9. junij 005 Ime in priimek: Vpisna št: Zaporedna številka izpita: Navodila Pazljivo preberite besedilo naloge, preden se lotite reševanja. Veljale bodo
FAKULTETA ZA STROJNIŠTVO Matematika Pisni izpit 9. junij 005 Ime in priimek: Vpisna št: Zaporedna številka izpita: Navodila Pazljivo preberite besedilo naloge, preden se lotite reševanja. Veljale bodo
Predtest iz za 1. kontrolno nalogo- 2K Teme za kontrolno nalogo: Podobni trikotniki. Izreki v pravokotnem trikotniku. Kotne funkcije poljubnega kota.
 Predtest iz za 1. kontrolno nalogo- K Teme za kontrolno nalogo: Podobni trikotniki. Izreki v pravokotnem trikotniku. Kotne funkcije poljubnega kota. Osnovne zveze med funkcijamo istega kota. Uporaba kotnih
Predtest iz za 1. kontrolno nalogo- K Teme za kontrolno nalogo: Podobni trikotniki. Izreki v pravokotnem trikotniku. Kotne funkcije poljubnega kota. Osnovne zveze med funkcijamo istega kota. Uporaba kotnih
UNIVERZA V MARIBORU FAKULTETA ZA STROJNIŠTVO Franci VRANETIČ UPORABA INTELIGENTNIH SISTEMOV PRI MONTAŽI Diplomsko delo Univerzitetni študijski program
 UNIVERZA V MARIBORU FAKULTETA ZA STROJNIŠTVO Franci VRANETIČ UPORABA INTELIGENTNIH SISTEMOV PRI MONTAŽI Univerzitetni študijski program 1. stopnje Strojništvo Maribor, september 2011 Fakulteta za strojništvo
UNIVERZA V MARIBORU FAKULTETA ZA STROJNIŠTVO Franci VRANETIČ UPORABA INTELIGENTNIH SISTEMOV PRI MONTAŽI Univerzitetni študijski program 1. stopnje Strojništvo Maribor, september 2011 Fakulteta za strojništvo
Navodila za montažo in vzdrževanje ventilatorjev EOLOSTAR ProFarm Košenina d.o.o. Spodnja Senica Medvode Tel. 01/ Faks: 01/ GSM
 Navodila za montažo in vzdrževanje ventilatorjev EOLOSTAR Spodnja Senica 9 1215 Medvode Tel. 01/3618-303 Faks: 01/3618-304 GSM. 040/21-33-55 Intenet: Uvod Ta navodila se navezujejo na sledeče tipe ventilatorjev
Navodila za montažo in vzdrževanje ventilatorjev EOLOSTAR Spodnja Senica 9 1215 Medvode Tel. 01/3618-303 Faks: 01/3618-304 GSM. 040/21-33-55 Intenet: Uvod Ta navodila se navezujejo na sledeče tipe ventilatorjev
Naloge 1. Dva električna grelnika z ohmskima upornostma 60 Ω in 30 Ω vežemo vzporedno in priključimo na idealni enosmerni tokovni vir s tokom 10 A. Tr
 Naloge 1. Dva električna grelnika z ohmskima upornostma 60 Ω in 30 Ω vežemo vzporedno in priključimo na idealni enosmerni tokovni vir s tokom 10 A. Trditev: idealni enosmerni tokovni vir obratuje z močjo
Naloge 1. Dva električna grelnika z ohmskima upornostma 60 Ω in 30 Ω vežemo vzporedno in priključimo na idealni enosmerni tokovni vir s tokom 10 A. Trditev: idealni enosmerni tokovni vir obratuje z močjo
REŠEVANJE DIFERENCIALNIH ENAČB Z MEHANSKIMI RAČUNSKIMI STROJI Pino Koc Seminar za učitelje matematike FMF, Ljubljana, 25. september 2015 Vir: [1] 1
![REŠEVANJE DIFERENCIALNIH ENAČB Z MEHANSKIMI RAČUNSKIMI STROJI Pino Koc Seminar za učitelje matematike FMF, Ljubljana, 25. september 2015 Vir: [1] 1](/thumbs/100/146244606.jpg "REŠEVANJE DIFERENCIALNIH ENAČB Z MEHANSKIMI RAČUNSKIMI STROJI Pino Koc Seminar za učitelje matematike FMF, Ljubljana, 25. september 2015 Vir: [1] 1") REŠEVANJE DIFERENCIALNIH ENAČB Z MEHANSKIMI RAČUNSKIMI STROJI Pino Koc Seminar za učitelje matematike FMF, Ljubljana, 25. september 2015 Vir: [1] 1 Nekateri pripomočki in naprave za računanje: 1a) Digitalni
REŠEVANJE DIFERENCIALNIH ENAČB Z MEHANSKIMI RAČUNSKIMI STROJI Pino Koc Seminar za učitelje matematike FMF, Ljubljana, 25. september 2015 Vir: [1] 1 Nekateri pripomočki in naprave za računanje: 1a) Digitalni
Uradni list RS - 32/2004, Uredbeni del
 PRILOGA VI POTRDILA O SKLADNOSTI (Vzorci vsebine) Stran 1 A) POTRDILO O SKLADNOSTI ZA VOZILO HOMOLOGIRANEGA TIPA POTRDILO O SKLADNOSTI ZA VOZILO HOMOLOGIRANEGA TIPA (1) (številka potrdila o skladnosti:)
PRILOGA VI POTRDILA O SKLADNOSTI (Vzorci vsebine) Stran 1 A) POTRDILO O SKLADNOSTI ZA VOZILO HOMOLOGIRANEGA TIPA POTRDILO O SKLADNOSTI ZA VOZILO HOMOLOGIRANEGA TIPA (1) (številka potrdila o skladnosti:)
Microsoft Word - Navodila_NSB2_SLO.doc
 Borovniško naselje 7 1412 Kisovec Slovenija Tel.: +386(0) 356 72 050 Fax.: +368(0)356 71 119 www.tevel.si Lastno varni napajalnik Tip NSB2/xx (NAVODILA ZA UPORABO) Navodila_NSB2_SLO.doc2/xx Stran 1 od
Borovniško naselje 7 1412 Kisovec Slovenija Tel.: +386(0) 356 72 050 Fax.: +368(0)356 71 119 www.tevel.si Lastno varni napajalnik Tip NSB2/xx (NAVODILA ZA UPORABO) Navodila_NSB2_SLO.doc2/xx Stran 1 od
resitve.dvi
 FAKULTETA ZA STROJNIŠTVO Matematika 2. kolokvij 4. januar 212 Ime in priimek: Vpisna št: Navodila Pazljivo preberite besedilo naloge, preden se lotite reševanja. Veljale bodo samo rešitve na papirju, kjer
FAKULTETA ZA STROJNIŠTVO Matematika 2. kolokvij 4. januar 212 Ime in priimek: Vpisna št: Navodila Pazljivo preberite besedilo naloge, preden se lotite reševanja. Veljale bodo samo rešitve na papirju, kjer
Navodilo Struktura cene izdelka Št. dokumenta : Izdaja: 01 Datum spremembe: Stran: 1/5 NAVODILO STRUKTURA CENE IZDELKA 1. POVZETEK
 Stran: 1/5 NAVODILO STRUKTURA CENE IZDELKA 1. POVZETEK Splošne informacije Naročnik E-mail Telefonska številka Datum Dobavitelj Dobaviteljeva št. Projekt Referenca Naziv Indeks Verzija Varianta Odgovorna
Stran: 1/5 NAVODILO STRUKTURA CENE IZDELKA 1. POVZETEK Splošne informacije Naročnik E-mail Telefonska številka Datum Dobavitelj Dobaviteljeva št. Projekt Referenca Naziv Indeks Verzija Varianta Odgovorna
OGRAJNI SISTEMI ZA TISTE, KI CENIJO SLOG Sezona 2019 MODNI DIZAJN TO SEZONO Udobje ob povratku To so naša vrata na električni pogon za o l ri hišo a D
 OGRAJNI SISTEMI ZA TISTE, KI CENIJO SLOG Sezona 2019 MODNI DIZAJN TO SEZONO Udobje ob povratku To so naša vrata na električni pogon za o l ri hišo a D ašo V 25 let izkušenj na področju ograjnih izdelkov
OGRAJNI SISTEMI ZA TISTE, KI CENIJO SLOG Sezona 2019 MODNI DIZAJN TO SEZONO Udobje ob povratku To so naša vrata na električni pogon za o l ri hišo a D ašo V 25 let izkušenj na področju ograjnih izdelkov
RAČUNALNIŠKA ORODJA V MATEMATIKI
 DEFINICIJA V PARAVOKOTNEM TRIKOTNIKU DEFINICIJA NA ENOTSKI KROŢNICI GRAFI IN LASTNOSTI SINUSA IN KOSINUSA POMEMBNEJŠE FORMULE Oznake: sinus kota x označujemo z oznako sin x, kosinus kota x označujemo z
DEFINICIJA V PARAVOKOTNEM TRIKOTNIKU DEFINICIJA NA ENOTSKI KROŢNICI GRAFI IN LASTNOSTI SINUSA IN KOSINUSA POMEMBNEJŠE FORMULE Oznake: sinus kota x označujemo z oznako sin x, kosinus kota x označujemo z
FGG13
 10.8 Metoda zveznega nadaljevanja To je metoda za reševanje nelinearne enačbe f(x) = 0. Če je težko poiskati začetni približek (še posebno pri nelinearnih sistemih), si lahko pomagamo z uvedbo dodatnega
10.8 Metoda zveznega nadaljevanja To je metoda za reševanje nelinearne enačbe f(x) = 0. Če je težko poiskati začetni približek (še posebno pri nelinearnih sistemih), si lahko pomagamo z uvedbo dodatnega
Dinamika, laboratorijske vaje
 Univerza v Ljubljani Fakulteta za strojništvo LADISK Laboratorij za dinamiko strojev in konstrukcij Dinamika Laboratorijske vaje 1 Določitev aksialnega masnega vztrajnostnega momenta ojnice 2 2 Uravnoteženje
Univerza v Ljubljani Fakulteta za strojništvo LADISK Laboratorij za dinamiko strojev in konstrukcij Dinamika Laboratorijske vaje 1 Določitev aksialnega masnega vztrajnostnega momenta ojnice 2 2 Uravnoteženje
Microsoft Word - 9.vaja_metoda porusnih linij.docx
 9. vaja: RAČUN EJNE NOSILNOSTI AB PLOŠČ PO ETODI PORUŠNIH LINIJ 1. ZASNOVA S pomočjo analize plošč po metodi porušnih linij bomo določili mejno obtežbo plošče, za katero poznamo geometrijo, robne pogoje
9. vaja: RAČUN EJNE NOSILNOSTI AB PLOŠČ PO ETODI PORUŠNIH LINIJ 1. ZASNOVA S pomočjo analize plošč po metodi porušnih linij bomo določili mejno obtežbo plošče, za katero poznamo geometrijo, robne pogoje
101353_-an-01-sl-_vbodni_termometer
 SLO - NAVODILO ZA NAMESTITEV IN UPORABO Št. izd. : 101353 www.conrad.si TFA LT-102 VBODNI TERMOMETER Št. izdelka: 101353 1 KAZALO 1 LASTNOSTI...3 2 LCD ZASLON...3 3 ZAČETEK OBRATOVANJA...3 4 UPRAVLJANJE...4
SLO - NAVODILO ZA NAMESTITEV IN UPORABO Št. izd. : 101353 www.conrad.si TFA LT-102 VBODNI TERMOMETER Št. izdelka: 101353 1 KAZALO 1 LASTNOSTI...3 2 LCD ZASLON...3 3 ZAČETEK OBRATOVANJA...3 4 UPRAVLJANJE...4
3. Preizkušanje domnev
 3. Preizkušanje domnev doc. dr. Miroslav Verbič miroslav.verbic@ef.uni-lj.si www.miroslav-verbic.si Ljubljana, februar 2014 3.1 Izračunavanje intervala zaupanja za vrednosti regresijskih koeficientov Motivacija
3. Preizkušanje domnev doc. dr. Miroslav Verbič miroslav.verbic@ef.uni-lj.si www.miroslav-verbic.si Ljubljana, februar 2014 3.1 Izračunavanje intervala zaupanja za vrednosti regresijskih koeficientov Motivacija
resitve.dvi
 FAKULTETA ZA STROJNISTVO Matematika Pisni izpit. junij 22 Ime in priimek Vpisna st Navodila Pazljivo preberite besedilo naloge, preden se lotite resevanja. Veljale bodo samo resitve na papirju, kjer so
FAKULTETA ZA STROJNISTVO Matematika Pisni izpit. junij 22 Ime in priimek Vpisna st Navodila Pazljivo preberite besedilo naloge, preden se lotite resevanja. Veljale bodo samo resitve na papirju, kjer so
Schöck Isokorb tip W Schöck Isokorb tip W W Schöck Isokorb tip W Primeren je za konzolne stenske plošče. Prenaša negativne momente in pozitivne prečne
 Primeren je za konzolne stenske plošče. Prenaša negativne momente in pozitivne prečne sile. Poleg tega prenaša tudi izmenične vodoravne sile. 111 Razvrstitev elementov Prerez pri vgrajevanju zunaj znotraj
Primeren je za konzolne stenske plošče. Prenaša negativne momente in pozitivne prečne sile. Poleg tega prenaša tudi izmenične vodoravne sile. 111 Razvrstitev elementov Prerez pri vgrajevanju zunaj znotraj
Watch 40_MT40X_UM_SL.pdf
 Navodila za uporabo MT40X Vsebina 1 1 Glej pregled... 1 Tipka za vklop/izklop... 1 2 2 Odstranite trakove... 2 Pripenjanje novih trakov... 3 3 3... 3... 4 Vklop ure... 4... 4 Jezik... 4 4 5 5 5 6 6 7...
Navodila za uporabo MT40X Vsebina 1 1 Glej pregled... 1 Tipka za vklop/izklop... 1 2 2 Odstranite trakove... 2 Pripenjanje novih trakov... 3 3 3... 3... 4 Vklop ure... 4... 4 Jezik... 4 4 5 5 5 6 6 7...
Priloga 1: Pravila za oblikovanje in uporabo standardiziranih referenc pri opravljanju plačilnih storitev Stran 4012 / Št. 34 / Uradni lis
 Priloga 1: Pravila za oblikovanje in uporabo standardiziranih referenc pri opravljanju plačilnih storitev Stran 4012 / Št. 34 / 24. 5. 2019 Uradni list Republike Slovenije PRILOGA 1 PRAVILA ZA OBLIKOVANJE
Priloga 1: Pravila za oblikovanje in uporabo standardiziranih referenc pri opravljanju plačilnih storitev Stran 4012 / Št. 34 / 24. 5. 2019 Uradni list Republike Slovenije PRILOGA 1 PRAVILA ZA OBLIKOVANJE
an-01-sl-Neprava_nadzorna_kamera_z_utripajoco_LED.docx
 SLO - NAVODILA ZA UPORABO IN MONTAŽO Kat. št.: 11 75 222 www.conrad.si NAVODILA ZA UPORABO Neprava nadzorna kamera z utripajočo LED Kataloška št.: 11 75 222 KAZALO PRAVILNA UPORABA... 3 VSEBINA PAKETA...
SLO - NAVODILA ZA UPORABO IN MONTAŽO Kat. št.: 11 75 222 www.conrad.si NAVODILA ZA UPORABO Neprava nadzorna kamera z utripajočo LED Kataloška št.: 11 75 222 KAZALO PRAVILNA UPORABA... 3 VSEBINA PAKETA...
Microsoft Word - 9.vaja_metoda porusnih linij_17-18
 9. vaja: RAČUN EJNE NOSILNOSTI AB PLOŠČ PO ETODI PORUŠNIH LINIJ S pomočjo analize plošč po metodi porušnih linij določite mejno obtežbo plošče, za katero poznate geometrijo, robne pogoje ter razporeditev
9. vaja: RAČUN EJNE NOSILNOSTI AB PLOŠČ PO ETODI PORUŠNIH LINIJ S pomočjo analize plošč po metodi porušnih linij določite mejno obtežbo plošče, za katero poznate geometrijo, robne pogoje ter razporeditev
VHF1-VHF2
 VHF BREZŽIČNI MIKROFONSKI KOMPLET VHF1: 1 CHANNEL VHF2: 2 CHANNELS NAVODILA ZA UPORABO SLO Hvala, ker ste izbrali naš BREZŽIČNI MIKROFONSKI KOMPLET IBIZA SOUND. Za vašo lastno varnost, preberite ta navodila
VHF BREZŽIČNI MIKROFONSKI KOMPLET VHF1: 1 CHANNEL VHF2: 2 CHANNELS NAVODILA ZA UPORABO SLO Hvala, ker ste izbrali naš BREZŽIČNI MIKROFONSKI KOMPLET IBIZA SOUND. Za vašo lastno varnost, preberite ta navodila
(Slovenian) DM-RD Navodila za trgovce Zadnji menjalnik za gorska kolesa MTB SHADOW RD+ RD-M986 RD-M820 RD-M786 RD-M675 RD-M640 RD-M615 MTB SHAD
 DM-RD Navodila za trgovce Zadnji menjalnik za gorska kolesa MTB SHADOW RD+ RD-M986 RD-M820 RD-M786 RD-M675 RD-M640 RD-M615 MTB SHAD") (Slovenian) DM-RD0001-06 Navodila za trgovce Zadnji menjalnik za gorska kolesa MTB SHADOW RD+ RD-M986 RD-M820 RD-M786 RD-M675 RD-M640 RD-M615 MTB SHADOW RD RD-M981 RD-M781 RD-M670 RD-M610 RD-M4000 RD-M3000
(Slovenian) DM-RD0001-06 Navodila za trgovce Zadnji menjalnik za gorska kolesa MTB SHADOW RD+ RD-M986 RD-M820 RD-M786 RD-M675 RD-M640 RD-M615 MTB SHADOW RD RD-M981 RD-M781 RD-M670 RD-M610 RD-M4000 RD-M3000
STAVKI _5_
 5. Stavki (Teoremi) Vsebina: Stavek superpozicije, stavek Thévenina in Nortona, maksimalna moč na bremenu (drugič), stavek Tellegena. 1. Stavek superpozicije Ta stavek določa, da lahko poljubno vezje sestavljeno
5. Stavki (Teoremi) Vsebina: Stavek superpozicije, stavek Thévenina in Nortona, maksimalna moč na bremenu (drugič), stavek Tellegena. 1. Stavek superpozicije Ta stavek določa, da lahko poljubno vezje sestavljeno
untitled
 BREMENSKE JEKLENE VRVI kakovostnega razreda 5, izdelani po EN 131 v izvedbi z 1, 2, 3 ali stremeni NAVODILO ZA UPORABO Ta navodila naj pazljivo preberejo vsi uporabniki. Olajšala vam bodo delo s stroji
BREMENSKE JEKLENE VRVI kakovostnega razreda 5, izdelani po EN 131 v izvedbi z 1, 2, 3 ali stremeni NAVODILO ZA UPORABO Ta navodila naj pazljivo preberejo vsi uporabniki. Olajšala vam bodo delo s stroji
KATALOG SREBROVIH SPAJK
 KATALOG SREBROVIH SPAJK UNIVERZALNE SREBROVE SPAJKE BREZ KADMIJA Spajka Sestava % Območje Natezna Standardi Delovna Gostota taljenja trdnost Ag Cu Zn Ostalo temp. g/cm3 EN 17672 DIN 8513 N/mm2 Ag 56Sn
KATALOG SREBROVIH SPAJK UNIVERZALNE SREBROVE SPAJKE BREZ KADMIJA Spajka Sestava % Območje Natezna Standardi Delovna Gostota taljenja trdnost Ag Cu Zn Ostalo temp. g/cm3 EN 17672 DIN 8513 N/mm2 Ag 56Sn
Strokovni izobraževalni center Ljubljana, Srednja poklicna in strokovna šola Bežigrad PRIPRAVE NA PISNI DEL IZPITA IZ MATEMATIKE 2. letnik nižjega pok
 Strokovni izobraževalni center Ljubljana, Srednja poklicna in strokovna šola Bežigrad PRIPRAVE NA PISNI DEL IZPITA IZ MATEMATIKE 2. letnik nižjega poklicnega izobraževanja NAVODILA: Izpit iz matematike
Strokovni izobraževalni center Ljubljana, Srednja poklicna in strokovna šola Bežigrad PRIPRAVE NA PISNI DEL IZPITA IZ MATEMATIKE 2. letnik nižjega poklicnega izobraževanja NAVODILA: Izpit iz matematike
Installation manual
 EKRTR EKRTETS 1 2 1 2 3 60 87 170 161 ±1.5 m >0.2 m 3 5 4 34 125 4 5 28 50 EKRTR EKRTETS Vsebina Pred zagonom naprave pozorno preberite ta priročnik. Ne zavrzite ga. Spravite ga na varno mesto, ker ga
EKRTR EKRTETS 1 2 1 2 3 60 87 170 161 ±1.5 m >0.2 m 3 5 4 34 125 4 5 28 50 EKRTR EKRTETS Vsebina Pred zagonom naprave pozorno preberite ta priročnik. Ne zavrzite ga. Spravite ga na varno mesto, ker ga
ACAD-BAU-Analiza-prostorov
 ANALIZA PROSTOROV Ko obdelujemo večje projekte, je analiza prostorov zelo pomembna v vseh fazah projektiranja. Pri idejnem snovanju moramo npr. za določeno površino trgovske namembnosti zagotoviti primerno
ANALIZA PROSTOROV Ko obdelujemo večje projekte, je analiza prostorov zelo pomembna v vseh fazah projektiranja. Pri idejnem snovanju moramo npr. za določeno površino trgovske namembnosti zagotoviti primerno
Kazalo 1 DVOMESTNE RELACIJE Operacije z dvomestnimi relacijami Predstavitev relacij
 Kazalo 1 DVOMESTNE RELACIJE 1 1.1 Operacije z dvomestnimi relacijami...................... 2 1.2 Predstavitev relacij............................... 3 1.3 Lastnosti relacij na dani množici (R X X)................
Kazalo 1 DVOMESTNE RELACIJE 1 1.1 Operacije z dvomestnimi relacijami...................... 2 1.2 Predstavitev relacij............................... 3 1.3 Lastnosti relacij na dani množici (R X X)................
50020_00426_E_DuoControl CS_010419_SL.indb
 DuoControl CS SL Navodila za vgradnjo Stran 2 DuoControl CS Kazalo Uporabljeni simboli... 2 Navodila za vgradnjo Obseg dobave... 3 Varnostna navodila... 3 Zaščita pred umazanijo / naoljenjem... 3 Mere
DuoControl CS SL Navodila za vgradnjo Stran 2 DuoControl CS Kazalo Uporabljeni simboli... 2 Navodila za vgradnjo Obseg dobave... 3 Varnostna navodila... 3 Zaščita pred umazanijo / naoljenjem... 3 Mere
an-01-Stikalo_za_luc_za_na_stopnisce_Zamel_ASP-01.docx
 SLO - NAVODILA ZA UPORABO IN MONTAŽO Kat. št.: 146 29 41 www.conrad.si NAVODILA ZA UPORABO Časovno stikalo za luč za na stopnišče Zamel ASP-01 Kataloška št.: 146 29 41 KAZALO OPIS NAPRAVE... 3 LASTNOSTI...
SLO - NAVODILA ZA UPORABO IN MONTAŽO Kat. št.: 146 29 41 www.conrad.si NAVODILA ZA UPORABO Časovno stikalo za luč za na stopnišče Zamel ASP-01 Kataloška št.: 146 29 41 KAZALO OPIS NAPRAVE... 3 LASTNOSTI...
Navodila za izdelavo diplomskega dela
 UNIVERZA V MARIBORU FAKULTETA ZA GRADBENIŠTVO Andrej Gril VERIFIKACIJA RAZLIČNIH MODELOV STAVB ZA ANALIZO NIHAJNIH ČASOV GLEDE NA ŠTEVILO ETAŽ Diplomsko delo Maribor, maj 2013 I Diplomsko delo visokošolskega
UNIVERZA V MARIBORU FAKULTETA ZA GRADBENIŠTVO Andrej Gril VERIFIKACIJA RAZLIČNIH MODELOV STAVB ZA ANALIZO NIHAJNIH ČASOV GLEDE NA ŠTEVILO ETAŽ Diplomsko delo Maribor, maj 2013 I Diplomsko delo visokošolskega
VAJE
 UČNI LIST Kotne funkcije v pravokotnem trikotniku 1) Spremeni zapis kota iz decimalnega v stopinje in minute ali obratno: a),2 d) 19,1 8,9 e) 28 c) 2 f) 8 2) Spremeni zapis kota iz decimalnega v stopinje
UČNI LIST Kotne funkcije v pravokotnem trikotniku 1) Spremeni zapis kota iz decimalnega v stopinje in minute ali obratno: a),2 d) 19,1 8,9 e) 28 c) 2 f) 8 2) Spremeni zapis kota iz decimalnega v stopinje
REŠITVE Inteligentna ventilska tehnologija na enem mestu SMART IN FLOW CONTROL.
 REŠITVE Inteligentna ventilska tehnologija na enem mestu SMART IN FLOW CONTROL. SAMSON razvija in izdeluje regulacijske ventile praktično za vse zahteve in procese od kovanega krogelnega ventila do obvodnega
REŠITVE Inteligentna ventilska tehnologija na enem mestu SMART IN FLOW CONTROL. SAMSON razvija in izdeluje regulacijske ventile praktično za vse zahteve in procese od kovanega krogelnega ventila do obvodnega
Kotne in krožne funkcije Kotne funkcije v pravokotnem trikotniku β a c γ b α sin = a c cos = b c tan = a b cot = b a Sinus kota je razmerje kotu naspr
 Kotne in krožne funkcije Kotne funkcije v pravokotnem trikotniku β a c γ b α sin = a c cos= b c tan = a b cot = b a Sinus kota je razmerje kotu nasprotne katete in hipotenuze. Kosinus kota je razmerje
Kotne in krožne funkcije Kotne funkcije v pravokotnem trikotniku β a c γ b α sin = a c cos= b c tan = a b cot = b a Sinus kota je razmerje kotu nasprotne katete in hipotenuze. Kosinus kota je razmerje
Microsoft PowerPoint _12_15-11_predavanje(1_00)-IR-pdf
-IR-pdf") uporaba for zanke i iz korak > 0 oblika zanke: for i iz : korak : ik NE i ik DA stavek1 stavek2 stavekn stavek1 stavek2 stavekn end i i + korak I&: P-XI/1/17 uporaba for zanke i iz korak < 0 oblika zanke:
uporaba for zanke i iz korak > 0 oblika zanke: for i iz : korak : ik NE i ik DA stavek1 stavek2 stavekn stavek1 stavek2 stavekn end i i + korak I&: P-XI/1/17 uporaba for zanke i iz korak < 0 oblika zanke:
Microsoft Word - microtronic1.06
 Konfekcioniranje kablov Konfekcioniranje kablov je ena izmed glavnih dejavnosti s katero se ukvarja podjetje Microtronic. Večletne izkušnje na področju konfekcioniranja, tehnično znanje in primerna orodja,
Konfekcioniranje kablov Konfekcioniranje kablov je ena izmed glavnih dejavnosti s katero se ukvarja podjetje Microtronic. Večletne izkušnje na področju konfekcioniranja, tehnično znanje in primerna orodja,
VAJE
 UČNI LIST Geometrijska telesa Opomba: pri nalogah, kjer računaš maso jeklenih teles, upoštevaj gostoto jekla 7,86 g / cm ; gostote morebitnih ostalih materialov pa so navedene pri samih nalogah! Fe 1)
UČNI LIST Geometrijska telesa Opomba: pri nalogah, kjer računaš maso jeklenih teles, upoštevaj gostoto jekla 7,86 g / cm ; gostote morebitnih ostalih materialov pa so navedene pri samih nalogah! Fe 1)
Področje uporabe
 Regulator Področja uporabe Regulator DIALOG EQ je namenjen predvsem vodenju in nadziranju sistemov ogrevanja in hlajenja, lahko pa se uporabi tudi na različnih področjih avtomatizacije in inteligentnih
Regulator Področja uporabe Regulator DIALOG EQ je namenjen predvsem vodenju in nadziranju sistemov ogrevanja in hlajenja, lahko pa se uporabi tudi na različnih področjih avtomatizacije in inteligentnih
PowerPoint Presentation
 Lasersko obarvanje kovin Motivacija: Z laserskim obsevanjem je možno spremeniti tudi barvo kovinskih površin, kar odpira povsem nove možnosti označevanja in dekoracije najrazličnejših sestavnih delov in
Lasersko obarvanje kovin Motivacija: Z laserskim obsevanjem je možno spremeniti tudi barvo kovinskih površin, kar odpira povsem nove možnosti označevanja in dekoracije najrazličnejših sestavnih delov in
Matematika Diferencialne enačbe prvega reda (1) Reši diferencialne enačbe z ločljivimi spremenljivkami: (a) y = 2xy, (b) y tg x = y, (c) y = 2x(1 + y
 Reši diferencialne enačbe z ločljivimi spremenljivkami: (a) y = 2xy, (b) y tg x = y, (c) y = 2x(1 + y") Matematika Diferencialne enačbe prvega reda (1) Reši diferencialne enačbe z ločljivimi spremenljivkami: (a) y = 2xy, (b) y tg x = y, (c) y = 2x(1 + y 2 ). Rešitev: Diferencialna enačba ima ločljive spremenljivke,
Matematika Diferencialne enačbe prvega reda (1) Reši diferencialne enačbe z ločljivimi spremenljivkami: (a) y = 2xy, (b) y tg x = y, (c) y = 2x(1 + y 2 ). Rešitev: Diferencialna enačba ima ločljive spremenljivke,
STIGA PARK 4WD 92 M 107 M 107 M HD 121 M 110 Combi Pro 125 Combi Pro
 STIGA PARK 4WD 92 M 107 M 110 Combi Pro 125 Combi Pro 8211-0543-03 1 125 Combi Pro 2 2 1 3 A B C B 4 5 6 Torx T30 E F Torx T30 7 G H I 8 10 mm 10 mm 2 9 92/107 10 92/107 13 mm 13 mm 10 mm 11 92/107 M D
STIGA PARK 4WD 92 M 107 M 110 Combi Pro 125 Combi Pro 8211-0543-03 1 125 Combi Pro 2 2 1 3 A B C B 4 5 6 Torx T30 E F Torx T30 7 G H I 8 10 mm 10 mm 2 9 92/107 10 92/107 13 mm 13 mm 10 mm 11 92/107 M D
Vaje: Matrike 1. Ugani rezultat, nato pa dokaži z indukcijo: (a) (b) [ ] n 1 1 ; n N 0 1 n ; n N Pokaži, da je množica x 0 y 0 x
![Vaje: Matrike 1. Ugani rezultat, nato pa dokaži z indukcijo: (a) (b) [ ] n 1 1 ; n N 0 1 n ; n N Pokaži, da je množica x 0 y 0 x](/thumbs/99/142441276.jpg "Vaje: Matrike 1. Ugani rezultat, nato pa dokaži z indukcijo: (a) (b) [ ] n 1 1 ; n N 0 1 n ; n N Pokaži, da je množica x 0 y 0 x") Vaje: Matrike 1 Ugani rezultat, nato pa dokaži z indukcijo: (a) (b) [ ] n 1 1 ; n N n 1 1 0 1 ; n N 0 2 Pokaži, da je množica x 0 y 0 x y x + z ; x, y, z R y x z x vektorski podprostor v prostoru matrik
Vaje: Matrike 1 Ugani rezultat, nato pa dokaži z indukcijo: (a) (b) [ ] n 1 1 ; n N n 1 1 0 1 ; n N 0 2 Pokaži, da je množica x 0 y 0 x y x + z ; x, y, z R y x z x vektorski podprostor v prostoru matrik
SLO NAVODILA ZA UPORABO IN MONTAŽO Kat. št.: NAVODILA ZA UPORABO Merilnik ogljikovega monoksida Testo Kataloška št.: 10 1
 SLO NAVODILA ZA UPORABO IN MONTAŽO Kat. št.: 10 16 57 www.conrad.si NAVODILA ZA UPORABO Merilnik ogljikovega monoksida Testo 317 3 Kataloška št.: 10 16 57 KAZALO NAMEN UPORABE...3 TEHNIČNI PODATKI...3
SLO NAVODILA ZA UPORABO IN MONTAŽO Kat. št.: 10 16 57 www.conrad.si NAVODILA ZA UPORABO Merilnik ogljikovega monoksida Testo 317 3 Kataloška št.: 10 16 57 KAZALO NAMEN UPORABE...3 TEHNIČNI PODATKI...3
Layout 1
 jezik PROGRAM TRAKTORJV PROGRAM TRAKTORJV Ponudba specializiranih traktorjev PASQUALI je sestavljena iz strojev, ki so izjemno zanesljivi, večnamenski, kompaktni in okretni. Kratka medosna razdalja in
jezik PROGRAM TRAKTORJV PROGRAM TRAKTORJV Ponudba specializiranih traktorjev PASQUALI je sestavljena iz strojev, ki so izjemno zanesljivi, večnamenski, kompaktni in okretni. Kratka medosna razdalja in
Popravki nalog: Numerična analiza - podiplomski študij FGG : popravljena naloga : popravljena naloga 14 domače naloge - 2. skupina
 Popravki nalog: Numerična analiza - podiplomski študij FGG 9.8.24: popravljena naloga 4 3..25: popravljena naloga 4 domače naloge - 2. skupina V drugem delu morate rešiti toliko nalog, da bo njihova skupna
Popravki nalog: Numerična analiza - podiplomski študij FGG 9.8.24: popravljena naloga 4 3..25: popravljena naloga 4 domače naloge - 2. skupina V drugem delu morate rešiti toliko nalog, da bo njihova skupna
IZVEDBENA UREDBA KOMISIJE (EU) 2018/ z dne 16. julija o spremembi Izvedbene uredbe (EU) 2017/ za razjasnitev in
 2018/ z dne 16. julija o spremembi Izvedbene uredbe (EU) 2017/ za razjasnitev in") L 180/10 17.7.2018 IZVEDBENA UREDBA KOMISIJE (EU) 2018/1002 z dne 16. julija 2018 o spremembi Izvedbene uredbe (EU) 2017/1153 za razjasnitev in poenostavitev postopka korelacije ter njegovo prilagoditev
L 180/10 17.7.2018 IZVEDBENA UREDBA KOMISIJE (EU) 2018/1002 z dne 16. julija 2018 o spremembi Izvedbene uredbe (EU) 2017/1153 za razjasnitev in poenostavitev postopka korelacije ter njegovo prilagoditev
Poskusi s kondenzatorji
 Poskusi s kondenzatorji Samo Lasič, Fakulteta za Matematiko in Fiziko, Oddelek za fiziko, Ljubljana Povzetek Opisani so nekateri poskusi s kondenzatorji, ki smo jih izvedli z merilnim vmesnikom LabPro.
Poskusi s kondenzatorji Samo Lasič, Fakulteta za Matematiko in Fiziko, Oddelek za fiziko, Ljubljana Povzetek Opisani so nekateri poskusi s kondenzatorji, ki smo jih izvedli z merilnim vmesnikom LabPro.
Diapozitiv 1
 BEKEND - TEHNIKA CILJI 1. Poznati vrste in dele bekenda 2. Uporabiti biomehanske principe pri analizi bekenda 3. Poznati tehnične podrobnosti pri izvedbi bekenda. BEKEND osnovni podatki včasih je bil udarec,
BEKEND - TEHNIKA CILJI 1. Poznati vrste in dele bekenda 2. Uporabiti biomehanske principe pri analizi bekenda 3. Poznati tehnične podrobnosti pri izvedbi bekenda. BEKEND osnovni podatki včasih je bil udarec,
Prevodnik_v_polju_14_
 14. Prevodnik v električnem polju Vsebina poglavja: prevodnik v zunanjem električnem polju, površina prevodnika je ekvipotencialna ploskev, elektrostatična indukcija (influenca), polje znotraj votline
14. Prevodnik v električnem polju Vsebina poglavja: prevodnik v zunanjem električnem polju, površina prevodnika je ekvipotencialna ploskev, elektrostatična indukcija (influenca), polje znotraj votline
Microsoft Word doc
 SLO - NAVODILO ZA NAMESTITEV IN UPORABO Št. izd. : 855319 www.conrad.si FANFARE S 5 RAZLIČNIMI ZVOKI LA CUCCARACHA Št. izdelka: 855319 1 KAZALO 1 OBSEG DOBAVE... 3 2 OPIS NAPRAVE... 3 3 VARNOSTNI NAPOTKI...
SLO - NAVODILO ZA NAMESTITEV IN UPORABO Št. izd. : 855319 www.conrad.si FANFARE S 5 RAZLIČNIMI ZVOKI LA CUCCARACHA Št. izdelka: 855319 1 KAZALO 1 OBSEG DOBAVE... 3 2 OPIS NAPRAVE... 3 3 VARNOSTNI NAPOTKI...
SEAT Ateca.
 SEAT Ateca. Tehnični podatki. Motor 1.0 EcoTSI 115 KM (85 kw) MQ-6 Start/Stop 1.5 EcoTSI 150 KM (110 kw) ACT MQ-6 Start/Stop ACT DSG-7 Start/Stop Valji/ventili (skupaj) 3/12 4/16 4/16 Gibna prostornina
SEAT Ateca. Tehnični podatki. Motor 1.0 EcoTSI 115 KM (85 kw) MQ-6 Start/Stop 1.5 EcoTSI 150 KM (110 kw) ACT MQ-6 Start/Stop ACT DSG-7 Start/Stop Valji/ventili (skupaj) 3/12 4/16 4/16 Gibna prostornina
1. IDENTIFIKACIJA PODATKOVNEGA NIZA 1.1 Naslov Strukturno-tektonska karta Slovenije 1: Alternativni naslov Strukturno-tektonska karta Slove
 1. IDENTIFIKACIJA PODATKOVNEGA NIZA 1.1 Naslov Strukturno-tektonska karta Slovenije 1:250.000 1.2 Alternativni naslov Strukturno-tektonska karta Slovenije 1:250.000 1.3 Okrajšani naslov - 1.4 Globalni
1. IDENTIFIKACIJA PODATKOVNEGA NIZA 1.1 Naslov Strukturno-tektonska karta Slovenije 1:250.000 1.2 Alternativni naslov Strukturno-tektonska karta Slovenije 1:250.000 1.3 Okrajšani naslov - 1.4 Globalni
FGG14
 Iterativne metode podprostorov Iterativne metode podprostorov uporabljamo za numerično reševanje linearnih sistemov ali računanje lastnih vrednosti problemov z velikimi razpršenimi matrikami, ki so prevelike,
Iterativne metode podprostorov Iterativne metode podprostorov uporabljamo za numerično reševanje linearnih sistemov ali računanje lastnih vrednosti problemov z velikimi razpršenimi matrikami, ki so prevelike,
dr. Andreja Šarlah Teorijska fizika II (FMF, Pedagoška fizika, 2010/11) kolokviji in izpiti Vsebina Kvantna mehanika 2 1. kolokvij 2 2. kolokvij 4 1.
 kolokviji in izpiti Vsebina Kvantna mehanika 2 1. kolokvij 2 2. kolokvij 4 1.") dr. Andreja Šarlah Teorijska fizika II (FMF, Pedagoška fizika, 2010/11) kolokviji in izpiti Vsebina Kvantna mehanika 2 1. kolokvij 2 2. kolokvij 4 1. izpit 5 2. izpit 6 3. izpit (2014) 7 Termodinamika
dr. Andreja Šarlah Teorijska fizika II (FMF, Pedagoška fizika, 2010/11) kolokviji in izpiti Vsebina Kvantna mehanika 2 1. kolokvij 2 2. kolokvij 4 1. izpit 5 2. izpit 6 3. izpit (2014) 7 Termodinamika
(Microsoft PowerPoint - vorsic ET 9.2 OES matri\350ne metode 2011.ppt [Compatibility Mode])
![(Microsoft PowerPoint - vorsic ET 9.2 OES matri\350ne metode 2011.ppt [Compatibility Mode])](/thumbs/100/144336199.jpg "(Microsoft PowerPoint - vorsic ET 9.2 OES matri\350ne metode 2011.ppt [Compatibility Mode])") 8.2 OBRATOVANJE ELEKTROENERGETSKEGA SISTEMA o Matrične metode v razreševanju el. omrežij Matrične enačbe električnih vezij Numerične metode za reševanje linearnih in nelinearnih enačb Sistem algebraičnih
8.2 OBRATOVANJE ELEKTROENERGETSKEGA SISTEMA o Matrične metode v razreševanju el. omrežij Matrične enačbe električnih vezij Numerične metode za reševanje linearnih in nelinearnih enačb Sistem algebraičnih
CY110 Sistem glavnega ključazmogljivost, ki presega standard
 CY110 Sistem glavnega ključazmogljivost, ki presega standard Zaupanja vredna tehnologija ploščatih ključev za širok spekter uporabe Patentirani obojestranski ključ CY110 nudi podobne prednosti, kot sistemi
CY110 Sistem glavnega ključazmogljivost, ki presega standard Zaupanja vredna tehnologija ploščatih ključev za širok spekter uporabe Patentirani obojestranski ključ CY110 nudi podobne prednosti, kot sistemi
30 Vpihovalne šobe Vpihovalna šoba VŠ-4 Uporaba Vpihovalne šobe VŠ-4 se uporabljajo za oskrbovanje prostorov s hladnim ali toplim zrakom povsod tam, k
 30 Vpihovalna šoba VŠ-4 Uporaba VŠ-4 se uporabljajo za oskrbovanje prostorov s hladnim ali toplim zrakom povsod tam, kjer se zahtevajo velike dometne razdalje in nizka stopnja šumnosti. S postavitvijo
30 Vpihovalna šoba VŠ-4 Uporaba VŠ-4 se uporabljajo za oskrbovanje prostorov s hladnim ali toplim zrakom povsod tam, kjer se zahtevajo velike dometne razdalje in nizka stopnja šumnosti. S postavitvijo
Novi SEAT Tarraco.
 Novi SEAT Tarraco. Tehnični podatki. 1.5 EcoTSI 150 KM (110 kw) 2.0 EcoTSI 190 KM (140 kw) ACT DSG-7 4Drive Start/Stop 2.0 TDI 150 KM (110 kw) 2.0 TDI 190 KM (140 kw) CR DSG-7 4Drive Start/Stop Motor CR
Novi SEAT Tarraco. Tehnični podatki. 1.5 EcoTSI 150 KM (110 kw) 2.0 EcoTSI 190 KM (140 kw) ACT DSG-7 4Drive Start/Stop 2.0 TDI 150 KM (110 kw) 2.0 TDI 190 KM (140 kw) CR DSG-7 4Drive Start/Stop Motor CR
Uvodno predavanje
 RAČUNALNIŠKA ORODJA Simulacije elektronskih vezij M. Jankovec 2.TRAN analiza (Analiza v časovnem prostoru) Iskanje odziva nelinearnega dinamičnega vezja v časovnem prostoru Prehodni pojavi Stacionarno
RAČUNALNIŠKA ORODJA Simulacije elektronskih vezij M. Jankovec 2.TRAN analiza (Analiza v časovnem prostoru) Iskanje odziva nelinearnega dinamičnega vezja v časovnem prostoru Prehodni pojavi Stacionarno
SLO NAVODILA ZA UPORABO IN MONTAŽO Kat. št.: NAVODILA ZA UPORABO Laserliner tester napetosti AC tive Finder Kataloška št.: 12 3
 SLO NAVODILA ZA UPORABO IN MONTAŽO Kat. št.: 12 33 32 www.conrad.si NAVODILA ZA UPORABO Laserliner tester napetosti AC tive Finder Kataloška št.: 12 33 32 KAZALO 1. FUNKCIJE / UPORABA... 3 2. VARNOSTNI
SLO NAVODILA ZA UPORABO IN MONTAŽO Kat. št.: 12 33 32 www.conrad.si NAVODILA ZA UPORABO Laserliner tester napetosti AC tive Finder Kataloška št.: 12 33 32 KAZALO 1. FUNKCIJE / UPORABA... 3 2. VARNOSTNI
Einsatzgrenzendiagramm
 Tehnični podatki LA 6ASR Informacije o napravi LA 6ASR Izvedba - Izvor toplote Zunanji zrak - Različica - Reguliranje - Mesto postavitve Zunanje - Stopnje moči Meje uporabe - Min. temperatura vode / Maks.
Tehnični podatki LA 6ASR Informacije o napravi LA 6ASR Izvedba - Izvor toplote Zunanji zrak - Različica - Reguliranje - Mesto postavitve Zunanje - Stopnje moči Meje uporabe - Min. temperatura vode / Maks.
Slide 1
 Vsak vektor na premici skozi izhodišče lahko zapišemo kot kjer je v smerni vektor premice in a poljubno število. r a v Vsak vektor na ravnini skozi izhodišče lahko zapišemo kot kjer sta v, v vektorja na
Vsak vektor na premici skozi izhodišče lahko zapišemo kot kjer je v smerni vektor premice in a poljubno število. r a v Vsak vektor na ravnini skozi izhodišče lahko zapišemo kot kjer sta v, v vektorja na
P182C10111
 Š i f r a k a n d i d a t a : Državni izpitni center *P18C10111* JESENSKI IZPITNI ROK MATEMATIKA Izpitna pola Ponedeljek, 7. avgust 018 / 10 minut Dovoljeno gradivo in pripomočki: Kandidat prinese nalivno
Š i f r a k a n d i d a t a : Državni izpitni center *P18C10111* JESENSKI IZPITNI ROK MATEMATIKA Izpitna pola Ponedeljek, 7. avgust 018 / 10 minut Dovoljeno gradivo in pripomočki: Kandidat prinese nalivno
VARIMOT® in pribor
 Pogonska tehnika \ Avtomatizacija pogonov \ Sistemska integracija \ Storitve *2593728_0119* Popravki Variatorska gonila s protieksplozijsko zaščito VARIMOT in pribor Izdaja 01/2019 2593728/SL SEW-EURODRIVE
Pogonska tehnika \ Avtomatizacija pogonov \ Sistemska integracija \ Storitve *2593728_0119* Popravki Variatorska gonila s protieksplozijsko zaščito VARIMOT in pribor Izdaja 01/2019 2593728/SL SEW-EURODRIVE
C(2019)1789/F1 - SL
1789/F1 - SL") EVROPSKA KOMISIJA Bruselj, 13.3.2019 C(2019) 1789 final ANNEX 5 PRILOGA k Delegirani uredbi Komisije o dopolnitvi Direktive 2010/40/EU Evropskega parlamenta in Sveta v zvezi z uvajanjem in operativno uporabo
EVROPSKA KOMISIJA Bruselj, 13.3.2019 C(2019) 1789 final ANNEX 5 PRILOGA k Delegirani uredbi Komisije o dopolnitvi Direktive 2010/40/EU Evropskega parlamenta in Sveta v zvezi z uvajanjem in operativno uporabo
Udarna moč. Preprost nadzor. Nova generacija udarnih vrtalnikov. Home made by you. bosch-do-it.com
 Udarna moč. Preprost nadzor. Nova generacija udarnih vrtalnikov. Home made by you. bosch-do-it.com 73 Nm vrtilni moment* 900 W 2- stopnji hitrosti AdvancedImpact 900 Več informacij o AdvancedImpact 900
Udarna moč. Preprost nadzor. Nova generacija udarnih vrtalnikov. Home made by you. bosch-do-it.com 73 Nm vrtilni moment* 900 W 2- stopnji hitrosti AdvancedImpact 900 Več informacij o AdvancedImpact 900
Značilnosti prometnega toka
 /3/9 :46:57 AM Equation Chapter Section Predaanje : Gibanje kolone ozil Opazujmo ozila, ki ozijo koloni. Pri tem predpostaimo kar se da enostano situacijo. Ta je: sa ozila imajo enako hitrost sa ozila
/3/9 :46:57 AM Equation Chapter Section Predaanje : Gibanje kolone ozil Opazujmo ozila, ki ozijo koloni. Pri tem predpostaimo kar se da enostano situacijo. Ta je: sa ozila imajo enako hitrost sa ozila
REPUBLIKA SLOVENIJA SLUŽBA VLADE REPUBLIKE SLOVENIJE ZA RAZVOJ IN EVROPSKO KOHEZIJSKO POLITIKO NAVODILA ZA PRIJAVO LISTIN NA ZZI V PRIMERU PRO RATA V
 REPUBLIKA SLOVENIJA SLUŽBA VLADE REPUBLIKE SLOVENIJE ZA RAZVOJ IN EVROPSKO KOHEZIJSKO POLITIKO NAVODILA ZA PRIJAVO LISTIN NA ZZI V PRIMERU PRO RATA V IS e-ma Ljubljana, avgust 2019 1 Vsebina 1. UVOD...
REPUBLIKA SLOVENIJA SLUŽBA VLADE REPUBLIKE SLOVENIJE ZA RAZVOJ IN EVROPSKO KOHEZIJSKO POLITIKO NAVODILA ZA PRIJAVO LISTIN NA ZZI V PRIMERU PRO RATA V IS e-ma Ljubljana, avgust 2019 1 Vsebina 1. UVOD...
Denis Kokol POSTAVITEV ROBOTSKE CELICE ZA PRENOS PEČIC V PODJETJU GORENJE D.D. Diplomsko delo Maribor, september 2015
 Denis Kokol POSTAVITEV ROBOTSKE CELICE ZA PRENOS PEČIC V PODJETJU GORENJE D.D. Diplomsko delo Maribor, september 2015 POSTAVITEV ROBOTSKE CELICE ZA PRENOS PEČIC V PODJETJU GORENJE D.D. Diplomsko delo Študent:
Denis Kokol POSTAVITEV ROBOTSKE CELICE ZA PRENOS PEČIC V PODJETJU GORENJE D.D. Diplomsko delo Maribor, september 2015 POSTAVITEV ROBOTSKE CELICE ZA PRENOS PEČIC V PODJETJU GORENJE D.D. Diplomsko delo Študent:
Microsoft Word - CelotniPraktikum_2011_verZaTisk.doc
 Elektrotehniški praktikum Sila v elektrostatičnem polju Namen vaje Našli bomo podobnost med poljem mirujočih nabojev in poljem mas, ter kakšen vpliv ima relativna vlažnost zraka na hitrost razelektritve
Elektrotehniški praktikum Sila v elektrostatičnem polju Namen vaje Našli bomo podobnost med poljem mirujočih nabojev in poljem mas, ter kakšen vpliv ima relativna vlažnost zraka na hitrost razelektritve
Upravljanje sistema COBISS Navodila za uporabo tiskalnika CITIZEN S310II V1.0 VIF-NA-27-SI
 Navodila za uporabo tiskalnika CITIZEN S310II V1.0 VIF-NA-27-SI IZUM, 2015 COBISS, COMARC, COBIB, COLIB, IZUM so zaščitene znamke v lasti javnega zavoda IZUM. KAZALO VSEBINE 1 Uvod... 1 2 Uporaba tiskalnika...
Navodila za uporabo tiskalnika CITIZEN S310II V1.0 VIF-NA-27-SI IZUM, 2015 COBISS, COMARC, COBIB, COLIB, IZUM so zaščitene znamke v lasti javnega zavoda IZUM. KAZALO VSEBINE 1 Uvod... 1 2 Uporaba tiskalnika...
SLO NAVODILA ZA UPORABO IN MONTAŽO Kat. št.: NAVODILA ZA UPORABO Namizna tehtnica Kern FCE 6K2 Kataloška št.:
 SLO NAVODILA ZA UPORABO IN MONTAŽO Kat. št.: 12 43 82 www.conrad.si NAVODILA ZA UPORABO Namizna tehtnica Kern FCE 6K2 Kataloška št.: 12 43 82 KAZALO 1. TEHNIČNI PODATKI...3 2. IZJAVA O SKLADNOSTI...4 3.
SLO NAVODILA ZA UPORABO IN MONTAŽO Kat. št.: 12 43 82 www.conrad.si NAVODILA ZA UPORABO Namizna tehtnica Kern FCE 6K2 Kataloška št.: 12 43 82 KAZALO 1. TEHNIČNI PODATKI...3 2. IZJAVA O SKLADNOSTI...4 3.
EB-Therm 205 SL PRIROČNIK ZA EB-Therm 205
 EB-Therm 205 SL PRIROČNIK ZA EB-Therm 205 Kaj je EB-Therm 205 EB-Therm 205 je termostat z mikroprocesorjem in zaslonom LCD. Zaslon ima zatemnjeno ozadje, ki se v celoti osvetli, ko pritisnete enega od
EB-Therm 205 SL PRIROČNIK ZA EB-Therm 205 Kaj je EB-Therm 205 EB-Therm 205 je termostat z mikroprocesorjem in zaslonom LCD. Zaslon ima zatemnjeno ozadje, ki se v celoti osvetli, ko pritisnete enega od