Microsoft Word - PAR02 - Stradovnik.docx
|
|
|
- Mateja Javornik
- pred 4 leti
- Pregledov:
Transkripcija
1 Interaktivna laboratorijska aplikacija s kolaborativnim robotom Saša Stradovnik, Rok Pučko, Aleš Hace Univerza v Mariboru, Fakulteta za elektrotehniko, računalništvo in informatiko Koroška cesta 46, 2000 Maribor sasa.stradovnik@um.si, rok.pucko@um.si, ales.hace@um.si Interactive laboratory application with a collaborative robot Most collaborative robot applications, which can be currently seen in industry, have been designed to perform deterministic repetitive manufacturing tasks. Physical contact between a robot and a human is usually not provided in the task execution, since it presents a potential harmful hazard for the human worker. In this case, a safety-related stop would be triggered immediately that leads to lower productivity and lower task performance efficiency. However, the collaborative robot systems provide a possibility to involve a human with his intelligent creativity and motion dexterity into the process workflow, which may improve flexibility of the collaborative robotic application that can be achieved only hardly by a conventional robotization approach. The collaborative robotic systems enable planned physical human-robot interaction, which is allowed also by technical specification of the safety standard for robotization issued in 2016 (ISO/TS 15066). In this paper, we describe an approach for flexible definition and adaptation of a collaborative robot task in which a physical human-robot contact can be used as a natural and intuitive interaction. We demonstrate the approach on the case of experimental laboratory screwing application, which furthermore enables upgrading with other technologies for facilitating human-robot collaboration such as augmented reality. Kratek pregled prispevka Večina kolaborativnih robotskih aplikacij, ki jih dandanes srečamo v industriji, je načrtovana s ciljem izvajanja točno določenih ponavljajočih se nalog. Fizični stik med robotom in človekom običajno ni vključen v izvedbo naloge, saj lahko predstavlja nevarnost za človeka. V primeru potencialno škodljivega dotika varnostni mehanizmi sprožijo takojšnjo zaustavitev robota, kar zmanjšuje produktivnost in učinkovitost izvedbe naloge. Vendar pa kolaborativni robotski sistemi ponujajo možnost, da se človek s svojo kreativnostjo aktivno vključuje v delovni proces, kar omogoča večjo prilagodljivost robotske aplikacije, ki jo sicer z običajno robotizacijo težko dosežemo. Kolaborativni roboti omogočajo načrtovane fizične stike kot obliko interakcije človekrobot, kar dovoljujejo tudi novejši standardi za varnost v robotski avtomatizaciji (ISO/TS 15066). V članku opisujemo pristop prilagajanja kolaborativne robotske naloge, kjer fizični stik med robotom in človekom uporabimo kot obliko naravne in učinkovite interakcije. Demonstracija je narejena na primeru eksperimentalne laboratorijske aplikacije vijačenja, ki omogoča nadgradnjo s spremljajočimi tehnologijami kolaborativnih robotskih sistemov, kot je obogatena resničnost.
2 1 Uvod Kolaborativne robotske aplikacije omogočajo, da je človek aktivno vključen v proizvodne postopke na načine, kot jih avtomatizacija s klasično robotiko zaenkrat še ne dopušča. Razlogov za to je več. S klasično robotizacijo pogosto ne moremo popolnoma avtomatizirati sistema ali pa to ni ekonomsko upravičeno. Z vključevanjem človeka v proces pa lahko dosežemo bolj optimalno izvedbo, saj lahko uporabimo njegovo spretnost, inteligenco, kreativnost, sposobnost zaznavanja in odločanja, ki nam s trenutno razvojno stopnjo robotskih tehnologij še ni na voljo. Tehnična specifikacija ISO/TS 15066, kot sestavni del standarda ISO 10218, definira 4 nivoje kolaborativnosti med človekom in robotom [1, 2]. Aplikacija je lahko kolaborativna, če omogoča takšno načrtovanje robotizacije, da je nivo tveganja sprejemljiv. Kolaborativnost na podlagi ročnega vodenja (ang.»hand-guiding operation«) in omejene mehanske moči in sile (ang.»power&force limiting«) zahtevata uporabo kolaborativnega robota. Za naravno interaktivno sodelovanje človeka s kolaborativnim robotom je potreben intuitivni komunikacijski vmesnik. Ta vmesnik lahko vključuje različne tehnologije s pomočjo katerih človek sodeluje z robotom: varna fizična interakcija, tehnologija obogatene resničnosti, tehnologija prostorskega zaznavanja s pomočjo 3D kamere itd. Obogatena resničnost (ang. Augmented Reality, AR) je tehnologija, ki z dodatnimi digitalnimi informacijami prekriva realni svet in omogoča prepletanje resničnega in virtualnega sveta. Aplikacije obogatene resničnosti se razvijajo predvsem v smeri grafičnega prikazovanja 3D virtualnih objektov v prostoru, vključujejo pa tudi prostorsko predstavitev zvočnih signalov, zajem vhodnih podatkov iz okolja preko kretenj, prepoznavo objektov in glasov ter njihovo lokalizacijo. Ta tehnologija, v kombinaciji s kolaborativnimi robotskimi sistemi, prinaša številne nove, izboljšane možnosti komunikacije med robotom in človekom, ki so bile do sedaj omejene zgolj na našo domišljijo. V ta namen se obogatena resničnost uporablja predvsem z namenom definiranja robotske trajektorije, vizualizacije potencialno nevarnih območij, ki si jih delita človek in robot, simulacije robotske trajektorije pred njeno izvedbo ali z namenom posredovanja drugih relevantnih navodil in informacij človeku. Glede na uporabljeno opremo lahko objekte virtualnega sveta prikažemo prostorsko (zaslon, AR očal ali projekcijsko (projektor). V članku se ukvarjamo s hibridnim delovnim mestom, ki si ga delita človek in robot, in omogoča vzpostavitev neposredne fizične interakcije med njima, ki je načrtovana tako, da je za človeka varna. Človek in robot si delita delovni prostor z namenom razdelitve nalog glede na zmožnosti in razpoložljivosti enega in drugega, pri čemer bi lahko en človek sodeloval z več roboti hkrati. Fizični stik med njima omogoča prilagajanje robotske naloge preko kinestetičnega učenja z demonstracijo v primeru, da robotu ne uspe uspešno izvršiti dela robotske naloge. Na ta način človek izvaja nadzor nad procesom in pomaga robotu pri izvedbi zahtevnejših nalog. Uporabljen AR vmesnik omogoča prostorski 3D prikaz hologramov s prekrivanjem realnega prostora, ki smo ga uporabili za intuitivno in fleksibilno definiranje robotske naloge, za kar ne potrebujemo posebnega znanja o programiranju robotov. Za demonstracijo v laboratorijskem okolju smo izbrali robotizirano kolaborativno aplikacijo vijačenja. Vijačenje je na veliko prisotno v industriji sestavljanja (ang.»assembly industry«) in ima odličen potencial za uvedbo kolaborativne robotske aplikacije [3-5], saj je za človeka varna, vključuje pa manj in bolj zahtevne elementarne operacije, ki jih lahko učinkovito razdelimo med robota in človeka v sodelovalni nalogi na hibridnem delovnem mestu. 2 Kolaborativno vijačenje V laboratorijski robotski kolaborativni aplikaciji vijačenja uporabljamo industrijskega








, - fleksibilno")
 -")

, ustrezno adaptira")









3 kolaborativnega robota UR3e proizvajalca Universal Robots [6]. Zadnji sklep tega robota je neskončno vrtljiv, kar smo izkoristili kot»demonstracijski vijačnik«. Predmet sodelovalne naloge predvidenee navojne je vijačenje vijakovv v luknje nekega izdelka. Naloga robota je priviti vstavljene vijakee do predpisanega navora, človek pa v tej aplikaciji lahko: - vstavlja ustrezne vijake na pravilno mesto, hkrati pa lahko tudi vizualno pregleda vijake in defektnee odstrani, - pomaga robotu, tako da del naloge opravi človek sam (npr. človek zavijači nekaj vijakov, vendar ni nujno, da jih privije do konca, saj je to lahko fizično naporno), - fleksibilno definira potek robotske r naloge (npr. določi zaporedje vijakov z AR vmesnikom) - v primeru, da robotu ne uspe izvršiti neke operacije (npr. detektira manjkajočii ali neustrezno vstavljen vijak), ustrezno adaptira robotsko nalogo oz. program. Virtualni model robotske celice hibridnega delovnega mesta je prikazan na slikii 1, laboratorijska postavitev pa na sliki 2. Slika 1: Virtualni model hibridne delovne celice.. Slika 2: Laboratorijska postavitev delovne celice. Tabela 1: Razdelitev nalog robot - človekk Naloga Izvajalec Robot Človek Vstavljanje vijakov Vijačenje Meritev navora 2.1 Robotskii program Robotski program omogoča: - avtonomno delovanje po vnaprej izbranemm vrstnem redu parametrizacijaa vrstnegaa reda izvajanja, - sprotno spreminjanje parametrizacijee vrstnegaa reda izvajanja, - detekcijoo določenega odstopanja od predvidenega normalnega poteka vijačenja, - sprotno adaptacijo robotskega programaa (sprotno učenje operativnih točk), - vmesnikk med človekom in robotom r na osnovi fizičnega dotika. Robotski program in interakcija s človekom ter pripadajoč informacijski ski tok so predstavljeni s sliko 3.



















.")





4 gibati proti glavi vijaka. Odstopanje določi na podlagi položaja, v katerem zazna silo, kot je prikazano na sliki 5. Slika 3: Informacijski tok interaktivnega vmesnika človek robot. Vijačni cikel se začne tako, da človek nastavi vijake in nato sproži zagon programa preko uporabniške konzole. Robot avtonomno vijači po v naprej določenih položajih in vnaprej določenem zaporedju. Ko zavijači vse vijake se vijačni cikel konča. Človek lahko med vijačnim procesom po potrebi začasno ustavi robota. Pri tem se lahko posluži naravnega in intuitivnega vmesnika, ki je osnovan na fizičnem dotiku, ki je vključen v robotski program in ima natančno definiran odziv robota. V našem primeru smo ob detekciji dotika predvideli začasno zaustavitevv izvajanjaa robotskega programa s preklopom v kinestetični način premikanja robota. Preklop v kinestetični način je enostaven in intuitiven. Po začasni prekinitvi se lahko sproži nadaljevanjee izvajanja robotskega programa. Postopek je prikazan na sliki 4. Robotski program je načrtovan tako,, da sproti diagnosticira morebitna odstopanjaa na določenih delih procesa vijačenja. Program zaznava morebitno odsotnost vijaka na vijačnem mestu in prav tako morebitni spodrsljaj pri vijačenju vijaka (npr. položaj vijaka ni takšen, kot ga robot pričakuje in vijačnika ne pozicionira dovolj natančno ali pa je vijak postavljen poševno ipd.). Zaznavanje odstopanjaa od predvidenega poteka procesa je zasnovano na principu tipanja okolicee z vgrajenim senzorjem sile na vrhu robota. Robot pozicionira vijačno orodje nad vijak in se začne Slika 4: Detekcija dotika s preklopom v kinestetično vodenje; človekk se dotakne robota, robot zazna dotik in preklopi v kinestetično vodenje človek lahko l robota prosto premika, ) človek lahkoo sproži nadaljnje izvajanje robotskega programa. Slika 5: Zaznavanje pravilnega položaja in prisotnostii vijaka; robot zazna vijak naa pričakovanem mestu, robot zazna odsotnost vijaka,, robot zazna napačno pozicijo. V primeru zaznanega a odstopanja se robot ustavi in preklopi v kinestetični načinn premikanja terr hkrati too ustrezno signaliziraa človeku preko uporabniške konzole. Človek ima nato možnost s kinestetičnim vodenjem robota


![HoloLens [7] na sliki 10, ki smo jih](/docs-images/103/157132175/images/5-2.jpg "uporabili tudi pri naši laboratorijski")






















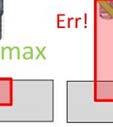
5 umakniti ali pa robota naučiti na novi položaj vijaka, kot je to prikazano na sliki 6. pa gotovo izstopajo očalaa Microsoftt HoloLens [7] na sliki 10, ki smo jih uporabili tudi pri naši laboratorijski aplikaciji a vijačenja. Slika 7: Varnostna omejitevv delovnega prostora beli kvader predstavlja prostor, kjer se lahko nahaja orodje robota. Slika 6: Detekcija odstopanja; robot zazna silo dotika z vijakom, ki ni na pričakovanem mestu, človek nauči robota na nov položaj vijaka, človek preko vmesnika sproži nadaljnje izvajanje. 2.2 Varnostne omejitve V kinestetičnem načinu vodenja lahko človek premika robota v omejenem delovnem prostoru. Te omejitve predstavljajo enega od varnostnih funkcij kolaborativnega robota. V našem primeru smo omejili položaj orodja z mejnimi ravninami (glej sliko 7) ter tudi rotacijo vijačnega orodja tako, da se prepreči usmeritev le-tega proti človeku. Če človek tekom kinestetičnega vodenja orodje robota pripeljee v bližino ene od mejnih ravnin, najprej začuti odbojno silo. s Če človek kljub temu nadaljuje in doseže mejno ravnino, se avtomatsko sproži varnostna zaustavitev (glej sliko 8). 3 Interaktivni komunikacijskii vmesnik z obogateno resničnostjo Današnja tehnologija obogatene resničnosti omogoča vrsto različnih vmesnikov. Eno izmed bolj intuitivnih komunikacij lahko dosežemo z uporabo naprav nameščenih na glavi, med njimi Slika 8: Varnostna zaustavitev robota blizu mejne ravnine. HoloLens je j prvi popolnoma samostojni holografski računalnik, ki združuje najsodobnejšo optiko in senzorje terr omogoča, da so 3D hologrami h postali del našegaa resničnega sveta. Sledenju pogledu in prepoznava kretenj predstavljajo primarni načinn vnosa podatkov pri teh očalih. S pogledom lahko uporabnik posreduje informacije o tem kaj gleda in s tem določi svoje namere. Kazalec, ki prekriva površino realnega sveta, predstavljaa povratno informacijo o tem kam je usmerjen uporabnikov pogled. V kombinaciji s prepoznavo človekovih kretenj ali govora lahko uporabnik proži izvršitev določenih ukazov.
![Slika 9: Očala za obogateno resničnost HoloLens [7] Za potrebe razvoja naše laboratorijske aplikacije smo](/docs-images/103/157132175/images/6-0.jpg "vzpostavili komunikaci ijsko povezavo UR3e ROS Unity HoloLens (glej sliko 11).")












6 Slika 9: Očala za obogateno resničnost HoloLens [7] Za potrebe razvoja naše laboratorijske aplikacije smo vzpostavili komunikaci ijsko povezavo UR3e ROS Unity HoloLens (glej sliko 11). Slika 11: Komunikacijska arhitektura za obogateno resničnost s HoloLens očali. Programska oprema Unity3D [8] je namenjenaa kreiranju virtualnih interaktivnihh 3D objektov holografskega vmesnika. Za integracijo očal HoloLens v robotski sistem pa je bilo potrebno vključiti še ROS [9], robotski operacijskii sistem, ki združuje programske knjižnice in orodja, ki so v pomoč pri razvoju tovrstnih robotskih aplikacij. Komunikacija med Unity3D in ROS poteka preko t. i.»rosbridge«z uporabo programske knjižnice ROS#, ki omogoča uvoz ali izvoz datotek v.urdf formatu iz ROS v Unity3D ali obratno, ter t vzpostavitev komunikacije med njima preko t. i.»websocket«komunikacijskega protokola. Komunikacija med robotom in ROS-om, ki poteka preko TCP/IPP protokola,, nam omogoča dostop do podatkov o položaju sklepov robota, podatkov o sili in navoru ter t temperaturi sklepov, stanja vhodno-izhodnihh enot, statusa robota in definiranjee robotske trajektorijee ali pošiljanje ukazov v programskem jeziku URScript, ki ga uporablja robotski krmilnik kolaborativnega robota UR3e. Slika 12: ARR vmesnik; virtualni gumbi za izbiro mesta vijačenja, b virtualni gumb za začetekk vijačenja, AR marker, m d) kretnja»air-tap«ar vmesnikk (glej sliko 12) vključuje šest virtualnih gumbov, ki so pozicioniranii na mestih, kjer je potrebno vstaviti vijake in omogočajoo definiranje robotske trajektorije terr določitev zaporedja vijačenja. Prostorska poravnava virtualnih objektov glede na n realno okolje in objekte v njem je dosežena z uporabo markerja v obliki QR kode, ki služi kot referenca za pozicioniranje virtualnih objektov v realnem svetu. Prepoznavo in sledenjee markerjem omogoča knjižnica Vuforia [10], ki jo lahko integriramo v programsko okolje Unity3D. Desno od omenjenih virtualnih gumbov je nameščenn virtualni gumb za z začetek vijačenja, ki ga pritisnemo po končani izbiri vijakov. Z uporabo intuitivnega holografskega vmesnika je definiranje robotske trajektorijee hitro in fleksibilno. Potrebno je določiti le mesta vijačenja in njihovo zaporedje izvajanja. Potek definicijee robotske naloge z AR vmesnikom: 1. S pogledom na virtualni gumb izberitee mesto vijačenja (vijak 1-6). 2. S kretnjo»air-tap««ali z uporabo klikerja potrdite izbiro (virtualni gumb se obarvaa zeleno). 3. Enak postopek ponovite za ostale vijake. 4. Po končani izbiri i usmerite pogled na virtualnii gumb»start SCREWING«in potrdite izbiro s kretnjo»air tap«ali z uporabo klikerja. 5. Izvede se virtualna simulacija robotske trajektorije. Če jee simulacija uspešno zaključena, ponovno pritisnite gumb»startt SCREWING«. 6. Parametri vijačenja se prenesejo na robotski krmilnik, ki izvrši načrtovanoo nalogo na realnem robotu. d)
.")







7 Slika 13: Holografski virtualni 3D model robota UR3e med izvajanjem simulacije prekriva realno okolje. Z namenom validacije definirane robotske trajektorije lahko holografski vmesnik prikaže simulacijo gibanja robota z virtualnim 3D modelom (glej sliko trajektorije 13). Simulacija predvidene robotske se pri tem izvede pred izvajanjem programa na realnem robotu. Na ta način lahko uporabnik preveri korektnost sekvence vijačenja in izvedljivosti naloge. Prav tako pa lahko tudi preveri, da bo izvedeno gibanje robota prostoo kolizij. 4 Zaključek Kolaborativne robotske aplikacije prinašajo v industrijo nove možnosti avtomatizacije. Verjetno jih je najbolj enostavno vpeljati v postopke sestavljanjaa ali montaže, ki vključujejo tipične operacije, kot je vijačenje. Pri tem lahko elementarnee operacije razdelimo tako, da človek vstavlja vijake v luknje, robot pa jih privijači. Na ta način se bistveno poenostavi naloga robota in tako proizvodna tehnologija. Znižajo se tudi investicijski stroški, kar je ugodno predvsem za avtomatizacijo delovnih mest v manjših in srednje velikih podjetjih. V nasprotju s popolnoma avtomatiziranimi sistemi vijačenja ni potrebe po dodatni opremi, ki bi i bila namenjana sortiranju, orientiranju in doziranju vijakov do vijačnika, ki je nameščen na robotu. Fizično zahtevnejše naloge vijačenja prevzame robot, medtem ko si deli delovni prostor s človekom. Definiranje robotske trajektorije je fleksibilno do te mere, da omogoča dinamično spreminjanje robotske trajektorije na zelo intuitiven način, saj lahko neposredno prilagaja trajektorijo praktično vsak uporabnik preko holografskega vmesnika, brez predhodnega znanja o programiranju robotov. Predstavljena laboratorijska aplikacija združuje ključne elemente, ki so potrebni za razvoj človeku varne in intuitivne kolaborativne aplikacije, v katero sta aktivno vključena človek in robot. Komunikacija med njima poteka na človeku naraven in učinkovit način (fizični stik, s holografski vmesnik). Fizična interakcija omogoča adaptacijo robotske naloge preko kinestetičnega učenja, z vmesnikomm obogatene resničnosti pa lahko robotsko nalogoo definiramo fleksibilno. Razvoj laboratorijske aplikacije želimo nadaljevati predvsem v smeri izboljšanja časovne učinkovitosti takšnih kolaborativnih sistemov z adaptivnim re-planiranjem robotske trajektorije na podlagi predvidevanja morebitnih kolizijj s človekom in okolico. 5 Zahvala To delo je bilo delno sofinancirano v okviru projekta ROBOTOOL-1, OP , Republika Slovenija in Evropska unija iz Evropskega sklada za regionalni razvoj. 6 Literatura [1] "ISO /2:20111 Robots and Robotic Devices Safety Requirements for Industrial Robots Part P 1: Robots/ /Part 2: Robott Systems and Integration.," [2] "ISO/TS 15066:20166 Robots and a Robotic Devices Collaborative C Robots," [3] A. Cherubini, R. Passama, P. Fraisse, and A. Crosnier,, "A unified multimodal control framework for human robot interaction," Robotics and Autonomous Systems, vol. 70, pp , [4] R. Gerbersa, M. Mückea, F. Dietricha, and K. Drödera, "Simplifying robot tools by taking advantage of sensorr integrationn in human collaboration robots," in 6th CIRP Conferencee on Assembly Technologies and Systems (CATS),, 2016, pp : Elsevier. [5] R.-J. Halmea, M. Lanza, J. Kamarainena, R. Pietersa, J. Latokartanoa, and A. Hietanen, "Review of vision-based safety systems for human-robot collaboration," in 51st CIRP Conference on Manufacturing Systems, 2018, vol. 72, pp. p : Elsevier. [6] "Universal Robots," Accessed on: Available: [7] "Microsoft HoloLens,," Accessed on: Available: US/hololens [8] "Unity3D," Accessed on: Available: [9] "ROS," Accessed on: Available: [10] "Vuforia," Accessed on: Available:
Microsoft Word - CNC obdelava kazalo vsebine.doc
 ŠOLSKI CENTER NOVO MESTO VIŠJA STROKOVNA ŠOLA STROJNIŠTVO DIPLOMSKA NALOGA Novo mesto, april 2008 Ime in priimek študenta ŠOLSKI CENTER NOVO MESTO VIŠJA STROKOVNA ŠOLA STROJNIŠTVO DIPLOMSKA NALOGA Novo
ŠOLSKI CENTER NOVO MESTO VIŠJA STROKOVNA ŠOLA STROJNIŠTVO DIPLOMSKA NALOGA Novo mesto, april 2008 Ime in priimek študenta ŠOLSKI CENTER NOVO MESTO VIŠJA STROKOVNA ŠOLA STROJNIŠTVO DIPLOMSKA NALOGA Novo
Slide 1
 Projektno vodenje PREDAVANJE 7 doc. dr. M. Zajc matej.zajc@fe.uni-lj.si Projektno vodenje z orodjem Excel Predstavitev Najbolj razširjeno orodje za delo s preglednicami Dva sklopa funkcij: Obdelava številk
Projektno vodenje PREDAVANJE 7 doc. dr. M. Zajc matej.zajc@fe.uni-lj.si Projektno vodenje z orodjem Excel Predstavitev Najbolj razširjeno orodje za delo s preglednicami Dva sklopa funkcij: Obdelava številk
Microsoft Word - ABB Robotski sistem za varjene osnove kontejnerja ASM-13.doc
 Posvet AVTOMATIZACIJA STREGE IN MONTAŽE 2013 Ljubljana, 4.december 2013 ABB ROBOTSKI SISTEM ZA VARJENJE OSNOVE KONTEJNERJA, Robert LOGAR POVZETEK Robotski sistemi se pogosteje uporabljajo za izdelavo izdelkov
Posvet AVTOMATIZACIJA STREGE IN MONTAŽE 2013 Ljubljana, 4.december 2013 ABB ROBOTSKI SISTEM ZA VARJENJE OSNOVE KONTEJNERJA, Robert LOGAR POVZETEK Robotski sistemi se pogosteje uporabljajo za izdelavo izdelkov
ISOFT , računalniški inženiring
 ISOFT, računalniški inženiring Marko Kastelic s.p. Sad 2, 1296 Šentvid pri stični Spletna stran podjetja:http://www.isoft.si podjetja ISOFT Spletna stran sistema sledenja vozil track.si: http://www.track.si
ISOFT, računalniški inženiring Marko Kastelic s.p. Sad 2, 1296 Šentvid pri stični Spletna stran podjetja:http://www.isoft.si podjetja ISOFT Spletna stran sistema sledenja vozil track.si: http://www.track.si
PKP projekt SMART WaterNet_Opis
 PKP projekt SMART WaterNet Po kreativni poti do znanja (PKP) opis programa Program Po kreativni poti do znanja omogoča povezovanje visokošolskih zavodov s trgom dela in tako daje možnost študentom za pridobitev
PKP projekt SMART WaterNet Po kreativni poti do znanja (PKP) opis programa Program Po kreativni poti do znanja omogoča povezovanje visokošolskih zavodov s trgom dela in tako daje možnost študentom za pridobitev
Microsoft PowerPoint - Sirikt-SK-FV.ppt
 E-učbeniki za izbrane naravoslovno-tehniške predmete E-books for selected science and technical subjects Slavko KOCIJANČIČ Univerza v Ljubljani, Pedagoška fakulteta slavko.kocijancic@pef.uni-lj.si Franc
E-učbeniki za izbrane naravoslovno-tehniške predmete E-books for selected science and technical subjects Slavko KOCIJANČIČ Univerza v Ljubljani, Pedagoška fakulteta slavko.kocijancic@pef.uni-lj.si Franc
INTERAKTIVNE REŠITVE PROMETHEAN
 INTERAKTIVNE REŠITVE PROMETHEAN Promethean je vodilni svetovni ponudnik interaktivne tehnologije na področju izobraževanja. S svojim inovativnim pristopom in vizijo prihodnosti, spreminjajo način sodelovanja
INTERAKTIVNE REŠITVE PROMETHEAN Promethean je vodilni svetovni ponudnik interaktivne tehnologije na področju izobraževanja. S svojim inovativnim pristopom in vizijo prihodnosti, spreminjajo način sodelovanja
Sistemi Daljinskega Vodenja Vaja 3 Matej Kristan Laboratorij za Strojni Vid Fakulteta za elektrotehniko, Univerza v Ljubl
 Sistemi Daljinskega Vodenja Vaja 3 Matej Kristan Laboratorij za Strojni Vid Fakulteta za elektrotehniko, Univerza v Ljubljani matej.kristan@fe.uni-lj.si Česa smo se naučili
Sistemi Daljinskega Vodenja Vaja 3 Matej Kristan Laboratorij za Strojni Vid Fakulteta za elektrotehniko, Univerza v Ljubljani matej.kristan@fe.uni-lj.si Česa smo se naučili
Gradbeništvo kot Industrija 4.0
 Povzetek: Kot vse druge panoge se mora gradbeništvo modernizirati Industrija 4.0 koncept, ki daje modernizaciji okvir, motivacijo, zagon Industrija 4.0 je stapljanje fizičnega in digitalnega sveta Gradbeništvo
Povzetek: Kot vse druge panoge se mora gradbeništvo modernizirati Industrija 4.0 koncept, ki daje modernizaciji okvir, motivacijo, zagon Industrija 4.0 je stapljanje fizičnega in digitalnega sveta Gradbeništvo
Document ID / Revision : 0519/1.3 ID Issuer System (sistem izdajatelja identifikacijskih oznak) Navodila za registracijo gospodarskih subjektov
 Navodila za registracijo gospodarskih subjektov") ID Issuer System (sistem izdajatelja identifikacijskih oznak) Navodila za registracijo gospodarskih subjektov Gospodarski subjekti Definicija: V skladu z 2. členom Izvedbene uredbe Komisije (EU) 2018/574
ID Issuer System (sistem izdajatelja identifikacijskih oznak) Navodila za registracijo gospodarskih subjektov Gospodarski subjekti Definicija: V skladu z 2. členom Izvedbene uredbe Komisije (EU) 2018/574
Poročilo projekta : Učinkovita raba energije Primerjava klasične sončne elektrarne z sončno elektrarno ki sledi soncu. Cilj projekta: Cilj našega proj
 Poročilo projekta : Učinkovita raba energije Primerjava klasične sončne elektrarne z sončno elektrarno ki sledi soncu. Cilj projekta: Cilj našega projekta je bil izdelati učilo napravo za prikaz delovanja
Poročilo projekta : Učinkovita raba energije Primerjava klasične sončne elektrarne z sončno elektrarno ki sledi soncu. Cilj projekta: Cilj našega projekta je bil izdelati učilo napravo za prikaz delovanja
BYOB Žogica v vesolju Besedilo naloge Glavna ideja igre je paziti, da žoga ne pade na tla igralne površine, pri tem pa zbrati čim več točk. Podobno ig
 BYOB Žogica v vesolju Besedilo naloge Glavna ideja igre je paziti, da žoga ne pade na tla igralne površe, pri tem pa zbrati čim več točk. Podobno igro najdemo tudi v knjigi Scratch (Lajovic, 2011), vendar
BYOB Žogica v vesolju Besedilo naloge Glavna ideja igre je paziti, da žoga ne pade na tla igralne površe, pri tem pa zbrati čim več točk. Podobno igro najdemo tudi v knjigi Scratch (Lajovic, 2011), vendar
Navodila za uporabo Mini snemalnik
 Navodila za uporabo Mini snemalnik www.spyshop.eu Pred vami so navodila za pravilno uporabo mini snemalnika in opis funkcionalnosti. Lastnosti snemalnika: Naziv Mere Teža Kapaciteta spomina Snemanje Format
Navodila za uporabo Mini snemalnik www.spyshop.eu Pred vami so navodila za pravilno uporabo mini snemalnika in opis funkcionalnosti. Lastnosti snemalnika: Naziv Mere Teža Kapaciteta spomina Snemanje Format
RAM stroj Nataša Naglič 4. junij RAM RAM - random access machine Bralno pisalni, eno akumulatorski računalnik. Sestavljajo ga bralni in pisalni
 RAM stroj Nataša Naglič 4. junij 2009 1 RAM RAM - random access machine Bralno pisalni, eno akumulatorski računalnik. Sestavljajo ga bralni in pisalni trak, pomnilnik ter program. Bralni trak- zaporedje
RAM stroj Nataša Naglič 4. junij 2009 1 RAM RAM - random access machine Bralno pisalni, eno akumulatorski računalnik. Sestavljajo ga bralni in pisalni trak, pomnilnik ter program. Bralni trak- zaporedje
Slide 1
 INTERAKTIVNA MULTIMEDIJA P4 in P5 doc. dr. Matej Zajc Pregled P4 Pregled P3: 4 pristopi k načrtovanju interaktivnosti PACT P4: PACT Nadaljevanje Prototipiranje Izbrani zakoni interaktivnosti People Ljudje
INTERAKTIVNA MULTIMEDIJA P4 in P5 doc. dr. Matej Zajc Pregled P4 Pregled P3: 4 pristopi k načrtovanju interaktivnosti PACT P4: PACT Nadaljevanje Prototipiranje Izbrani zakoni interaktivnosti People Ljudje
FOR SMARTER PEOPLE TAKO SE VLOMI PREPREČUJEJO DANES REHAU Smart Guard System plus preventivna protivlomna zaščita WINDOWS. REINVENTED FOR MODERN LIFE.
 FOR SMARTER PEOPLE TAKO SE VLOMI PREPREČUJEJO DANES REHAU Smart Guard System plus preventivna protivlomna zaščita WINDOWS. REINVENTED FOR MODERN LIFE. NA NOVO ZASNOVANA OKNA Za današnje življenje Naše
FOR SMARTER PEOPLE TAKO SE VLOMI PREPREČUJEJO DANES REHAU Smart Guard System plus preventivna protivlomna zaščita WINDOWS. REINVENTED FOR MODERN LIFE. NA NOVO ZASNOVANA OKNA Za današnje življenje Naše
Vaja 2 Virtualizacija fizičnih strežnikov in virtualni PC A. Strežnik Vmware ESX Namestitev strežnika VMware ESX 3.5 na fizični strežnik 2. Nas
 Vaja 2 Virtualizacija fizičnih strežnikov in virtualni PC A. Strežnik Vmware ESX 3.5 1. Namestitev strežnika VMware ESX 3.5 na fizični strežnik 2. Nastavitve strežnika ESX 3. Namestitev in nastavitve VM
Vaja 2 Virtualizacija fizičnih strežnikov in virtualni PC A. Strežnik Vmware ESX 3.5 1. Namestitev strežnika VMware ESX 3.5 na fizični strežnik 2. Nastavitve strežnika ESX 3. Namestitev in nastavitve VM
Macoma katalog copy
 POSLOVNE APLIKACIJE PO ŽELJAH NAROČNIKA Poročilni sistem Finance in kontroling Poprodaja Podatkovna skladišča Prodaja Proizvodnja Obstoječi ERP Partnerji Implementacija rešitev prilagojena po željah naročnika
POSLOVNE APLIKACIJE PO ŽELJAH NAROČNIKA Poročilni sistem Finance in kontroling Poprodaja Podatkovna skladišča Prodaja Proizvodnja Obstoječi ERP Partnerji Implementacija rešitev prilagojena po željah naročnika
Delavnica Načrtovanje digitalnih vezij
 Laboratorij za načrtovanje integriranih vezij Univerza v Ljubljani Fakulteta za elektrotehniko Programirljivi Digitalni Sistemi Digitalni sistem Digitalni sistemi na integriranem vezju Digitalni sistem
Laboratorij za načrtovanje integriranih vezij Univerza v Ljubljani Fakulteta za elektrotehniko Programirljivi Digitalni Sistemi Digitalni sistem Digitalni sistemi na integriranem vezju Digitalni sistem
IZGRADNJA PREDSTAVITVENE SPLETNE STRANI GLUCOWATCH Avtor: Marko Zajko Projekt delno financira Evropska unija, in sicer iz Evropskega socialnega sklada
 IZGRADNJA PREDSTAVITVENE SPLETNE STRANI GLUCOWATCH Avtor: Marko Zajko UPORABLJENE TEHNOLOGIJE Za izdelavo predstavitvene spletne strani smo izbrali tehnologije, ki zagotavljajo: Hitro delovanje spletne
IZGRADNJA PREDSTAVITVENE SPLETNE STRANI GLUCOWATCH Avtor: Marko Zajko UPORABLJENE TEHNOLOGIJE Za izdelavo predstavitvene spletne strani smo izbrali tehnologije, ki zagotavljajo: Hitro delovanje spletne
Delavnica Načrtovanje digitalnih vezij
 Laboratorij za načrtovanje integriranih vezij Univerza v Ljubljani Fakulteta za elektrotehniko Digitalni Elektronski Sistemi Osnove jezika VHDL Strukturno načrtovanje in testiranje Struktura vezja s komponentami
Laboratorij za načrtovanje integriranih vezij Univerza v Ljubljani Fakulteta za elektrotehniko Digitalni Elektronski Sistemi Osnove jezika VHDL Strukturno načrtovanje in testiranje Struktura vezja s komponentami
NEVTRIN d.o.o. Podjetje za razvoj elektronike, Podgorje 42a, 1241 Kamnik, Slovenia Telefon: Faks.: in
 NEVTRIN d.o.o. Podjetje za razvoj elektronike, Podgorje 42a, 1241 Kamnik, Slovenia Telefon: +386 1 729 6 460 Faks.: +386 1 729 6 466 www.nevtrin.si info@elektrina.si USB RFID READER Navodila za uporabo?
NEVTRIN d.o.o. Podjetje za razvoj elektronike, Podgorje 42a, 1241 Kamnik, Slovenia Telefon: +386 1 729 6 460 Faks.: +386 1 729 6 466 www.nevtrin.si info@elektrina.si USB RFID READER Navodila za uporabo?
UPRAVLJANJE RAZPRŠENIH PODATKOV Shranjevanje, zaščita in vzdrževanje informacij, ki jih najbolj potrebujete
 UPRAVLJANJE RAZPRŠENIH PODATKOV Shranjevanje, zaščita in vzdrževanje informacij, ki jih najbolj potrebujete ELEKTRONSKI PODATKI, KI JIH ORGANIZACIJA USTVARJA IN POTREBUJE ZA DOSTOP, SE KAŽEJO V RAZLIČNIH
UPRAVLJANJE RAZPRŠENIH PODATKOV Shranjevanje, zaščita in vzdrževanje informacij, ki jih najbolj potrebujete ELEKTRONSKI PODATKI, KI JIH ORGANIZACIJA USTVARJA IN POTREBUJE ZA DOSTOP, SE KAŽEJO V RAZLIČNIH
Microsoft PowerPoint - CIGER - SK 3-15 Izkusnje nadzora distribucijskih transformatorjev s pomo... [Read-Only]
![Microsoft PowerPoint - CIGER - SK 3-15 Izkusnje nadzora distribucijskih transformatorjev s pomo... [Read-Only]](/thumbs/99/139392392.jpg "Microsoft PowerPoint - CIGER - SK 3-15 Izkusnje nadzora distribucijskih transformatorjev s pomo... [Read-Only]") CIRED ŠK 3-15 IZKUŠNJE NADZORA DISTRIBUCIJSKIH TRANSFORMATORJEV S POMOČJO ŠTEVCEV ELEKTRIČNE ENERGIJE ŽIGA HRIBAR 1, BOŠTJAN FABJAN 2, TIM GRADNIK 3, BOŠTJAN PODHRAŠKI 4 1 Elektro novi sistemi. d.o.o.,
CIRED ŠK 3-15 IZKUŠNJE NADZORA DISTRIBUCIJSKIH TRANSFORMATORJEV S POMOČJO ŠTEVCEV ELEKTRIČNE ENERGIJE ŽIGA HRIBAR 1, BOŠTJAN FABJAN 2, TIM GRADNIK 3, BOŠTJAN PODHRAŠKI 4 1 Elektro novi sistemi. d.o.o.,
PRIPOROČILA ZA OBLIKOVANJE KATALOGOV ZNANJA ZA MODULE V PROGRAMIH VIŠJEGA STROKOVNEGA IZOBRAŽEVANJA
 KATALOG ZNANJA 1. IME PREDMETA ZBIRKE PODATKOV I ZBIRKE PODATKOV II 2. SPLOŠNI CILJI Splošni cilji predmeta so: razvijanje sposobnosti za uporabo znanstvenih metod in sredstev, razvijanje odgovornosti
KATALOG ZNANJA 1. IME PREDMETA ZBIRKE PODATKOV I ZBIRKE PODATKOV II 2. SPLOŠNI CILJI Splošni cilji predmeta so: razvijanje sposobnosti za uporabo znanstvenih metod in sredstev, razvijanje odgovornosti
VPELJAVA MDM V DRŽAVEM ZBORU MATJAŽ ZADRAVEC
 VPELJAVA MDM V DRŽAVEM ZBORU MATJAŽ ZADRAVEC Državni zbor v številkah 90 poslancev 9 + 1 poslanska skupina 150+ mobilnih naprav (OS Android, ios) 500+ internih uporabnikov, 650+ osebnih računalnikov, 1100+
VPELJAVA MDM V DRŽAVEM ZBORU MATJAŽ ZADRAVEC Državni zbor v številkah 90 poslancev 9 + 1 poslanska skupina 150+ mobilnih naprav (OS Android, ios) 500+ internih uporabnikov, 650+ osebnih računalnikov, 1100+
Microsoft Word - Navodila_NSB2_SLO.doc
 Borovniško naselje 7 1412 Kisovec Slovenija Tel.: +386(0) 356 72 050 Fax.: +368(0)356 71 119 www.tevel.si Lastno varni napajalnik Tip NSB2/xx (NAVODILA ZA UPORABO) Navodila_NSB2_SLO.doc2/xx Stran 1 od
Borovniško naselje 7 1412 Kisovec Slovenija Tel.: +386(0) 356 72 050 Fax.: +368(0)356 71 119 www.tevel.si Lastno varni napajalnik Tip NSB2/xx (NAVODILA ZA UPORABO) Navodila_NSB2_SLO.doc2/xx Stran 1 od
Nove različice programske opreme GE Podjetje GE Digital, vodilni svetovni proizvajalec programske opreme za področje avtomatike, je izdalo kar nekaj n
 Nove različice programske opreme GE Podjetje GE Digital, vodilni svetovni proizvajalec programske opreme za področje avtomatike, je izdalo kar nekaj novosti na področju SCADA sistemov (ifix Productivity
Nove različice programske opreme GE Podjetje GE Digital, vodilni svetovni proizvajalec programske opreme za področje avtomatike, je izdalo kar nekaj novosti na področju SCADA sistemov (ifix Productivity
(Microsoft PowerPoint - Milan Ojster\232ek_IJU2014)
") Organizacijski, tehnični in pravni vidiki vzpostavitve nacionalne infrastrukture odprtega dostopa Milan Ojsteršek Univerza v Mariboru, Fakulteta za elektrotehniko, računalništvo in informatiko 08. 12.
Organizacijski, tehnični in pravni vidiki vzpostavitve nacionalne infrastrukture odprtega dostopa Milan Ojsteršek Univerza v Mariboru, Fakulteta za elektrotehniko, računalništvo in informatiko 08. 12.
Analiza vpliva materiala, maziva in aktuatorja na dinamiko pnevmatičnega ventila
 Programsko orodje LabVIEW za kreiranje, zajem in obdelavo signalov (statične in dinamične karakteristike hidravličnih proporcionalnih ventilov) Marko Šimic Telefon: +386 1 4771 727 e-mail: marko.simic@fs.uni-lj.si
Programsko orodje LabVIEW za kreiranje, zajem in obdelavo signalov (statične in dinamične karakteristike hidravličnih proporcionalnih ventilov) Marko Šimic Telefon: +386 1 4771 727 e-mail: marko.simic@fs.uni-lj.si
Vzpostavitev več nivojske varnostne infrastrukture S pomočjo Elektro Maribor, McAfee SIEM, CISCO ISE, NGFW Zorna Varga, Sfera IT d.o.o in Klemen Bačak
 Vzpostavitev več nivojske varnostne infrastrukture S pomočjo Elektro Maribor, McAfee SIEM, CISCO ISE, NGFW Zorna Varga, Sfera IT d.o.o in Klemen Bačak, Sfera IT d.o.o. 1 Priprava na: Vzpostavitev več nivojske
Vzpostavitev več nivojske varnostne infrastrukture S pomočjo Elektro Maribor, McAfee SIEM, CISCO ISE, NGFW Zorna Varga, Sfera IT d.o.o in Klemen Bačak, Sfera IT d.o.o. 1 Priprava na: Vzpostavitev več nivojske
Excel 2016
 PRIDOBIVANJE TEMELJN IH IN POKLICNIH KOMPETENC OD 2019 DO 2022 HIPERPOVEZAVA Gradivo za interno uporabo AVTOR: Belinda Lovrenčič Gradivo ni lektorirano V Maj 2019 Operacijo sofinancira Evropska unija,
PRIDOBIVANJE TEMELJN IH IN POKLICNIH KOMPETENC OD 2019 DO 2022 HIPERPOVEZAVA Gradivo za interno uporabo AVTOR: Belinda Lovrenčič Gradivo ni lektorirano V Maj 2019 Operacijo sofinancira Evropska unija,
PowerPointova predstavitev
 Ajax profesionalni brezžični alarmni sistem Ajax profesionalni brezžični alarmni sistem Protivlomna in požarna zaščita & zaznavanje puščanja vode Ajax profesionalni brezžični alarmni sistem Možna integracija
Ajax profesionalni brezžični alarmni sistem Ajax profesionalni brezžični alarmni sistem Protivlomna in požarna zaščita & zaznavanje puščanja vode Ajax profesionalni brezžični alarmni sistem Možna integracija
Vedno pod nadzorom, kjerkoli že ste
 Vedno pod nadzorom, kjerkoli že ste 02 Vedno pod nadzorom, kjerkoli že ste Daikin zagotavlja novo rešitev za nadzorovanje in krmiljenje glavnih funkcij stanovanjskih notranjih enot. Sistem deluje na uporabniku
Vedno pod nadzorom, kjerkoli že ste 02 Vedno pod nadzorom, kjerkoli že ste Daikin zagotavlja novo rešitev za nadzorovanje in krmiljenje glavnih funkcij stanovanjskih notranjih enot. Sistem deluje na uporabniku
Microsoft PowerPoint - MK 3 tehnicni sistemi.ppt
 Opredelitev tehničnega sistema Proces prenosa naravnih sistemov v tehnični sisteme, kot posledica človekovega ustvarjanja 1 Uvod - kaj predstavlja tehnični sistem, splošni primeri Predstavitev primera
Opredelitev tehničnega sistema Proces prenosa naravnih sistemov v tehnični sisteme, kot posledica človekovega ustvarjanja 1 Uvod - kaj predstavlja tehnični sistem, splošni primeri Predstavitev primera
Microsoft PowerPoint - MK 3 tehnicni sistemi.ppt
 Opredelitev tehničnega sistema Proces prenosa naravnih sistemov v tehnični sisteme, kot posledica človekovega ustvarjanja 1 Uvod - kaj predstavlja tehnični sistem, splošni primeri Predstavitev primera
Opredelitev tehničnega sistema Proces prenosa naravnih sistemov v tehnični sisteme, kot posledica človekovega ustvarjanja 1 Uvod - kaj predstavlja tehnični sistem, splošni primeri Predstavitev primera
(Microsoft Word - U\350enje telegrafije po Kochovi metodi.doc)
") MORSE UČENJE PO KOCHOVI METODI Računalniški program za učenje skupaj z nekaterimi dodatnimi datotekami dobite na spletni strani avtorja: http://www.g4fon.net/. Zanimive strani so tudi: - http://www.qsl.net/n1irz/finley.morse.html
MORSE UČENJE PO KOCHOVI METODI Računalniški program za učenje skupaj z nekaterimi dodatnimi datotekami dobite na spletni strani avtorja: http://www.g4fon.net/. Zanimive strani so tudi: - http://www.qsl.net/n1irz/finley.morse.html
Prekinitveni način delovanja PLK Glavni program (OB1; MAIN) se izvaja ciklično Prekinitev začasno ustavi izvajanje glavnega programa in zažene izvajan
 se izvaja ciklično Prekinitev začasno ustavi izvajanje glavnega programa in zažene izvajan") Prekinitveni način delovanja PLK Glavni program (OB1; MAIN) se izvaja ciklično Prekinitev začasno ustavi izvajanje glavnega programa in zažene izvajanje prekinitvene rutine Dogodek GLAVNI PROGRAM (MAIN-OB1)
Prekinitveni način delovanja PLK Glavni program (OB1; MAIN) se izvaja ciklično Prekinitev začasno ustavi izvajanje glavnega programa in zažene izvajanje prekinitvene rutine Dogodek GLAVNI PROGRAM (MAIN-OB1)
PowerPoint-Präsentation
 ENERGETSKO POGODBENIŠTVO (EPC) V JAVNIH STAVBAH Podpora pri izvajanju energetske prenove stavb na lokalni ravni z mehanizmom energetskega pogodbeništva 12.10.2016, LJUBLJANA NIKO NATEK, KSSENA Projekt
ENERGETSKO POGODBENIŠTVO (EPC) V JAVNIH STAVBAH Podpora pri izvajanju energetske prenove stavb na lokalni ravni z mehanizmom energetskega pogodbeništva 12.10.2016, LJUBLJANA NIKO NATEK, KSSENA Projekt
10108-Bench-mark-brochure-6pg.indd
 Unikatna konstrukcija mostu Kompaktna izvedba O podjetju Perceptron: Temperaturna kompenzacija stroja in merjenca (opcijsko) X in Y osi na isti stopnji za povečano togost Perceptron (NASDAQ: PRCP) zagotavlja
Unikatna konstrukcija mostu Kompaktna izvedba O podjetju Perceptron: Temperaturna kompenzacija stroja in merjenca (opcijsko) X in Y osi na isti stopnji za povečano togost Perceptron (NASDAQ: PRCP) zagotavlja
Event name or presentation title
 Marko Škufca Vodja programa BI, ADD d.o.o. Gorazd Cah Specialist področja Služba za informatiko, DARS d.d. Izziv Rešitev Rezultati... PROCESI + TEHNOLOGIJA + LJUDJE Poslanstvo: s sodobnimi pristopi in
Marko Škufca Vodja programa BI, ADD d.o.o. Gorazd Cah Specialist področja Služba za informatiko, DARS d.d. Izziv Rešitev Rezultati... PROCESI + TEHNOLOGIJA + LJUDJE Poslanstvo: s sodobnimi pristopi in
give yourself a digital makeover
 Prenos znanja v praksi in projekti pametne vasi prof. dr. Janez Bešter 33. Posvet Javne službe kmetijskega svetovanja, 26.11.2018, Thermana, Laško Načrti in primeri AKIS Od načrtov v izvedbo in praktično
Prenos znanja v praksi in projekti pametne vasi prof. dr. Janez Bešter 33. Posvet Javne službe kmetijskega svetovanja, 26.11.2018, Thermana, Laško Načrti in primeri AKIS Od načrtov v izvedbo in praktično
Protokoli v računalniškem komuniciranju TCP, IP, nivojski model, paket informacij.
 Protokoli v računalniškem komuniciranju TCP, IP, nivojski model, paket informacij. Protokoli - uvod Protokol je pravilo ali zbirka pravil, ki določajo načine transporta sporočil po računalniškem omrežju
Protokoli v računalniškem komuniciranju TCP, IP, nivojski model, paket informacij. Protokoli - uvod Protokol je pravilo ali zbirka pravil, ki določajo načine transporta sporočil po računalniškem omrežju
SLO NAVODILA ZA UPORABO IN MONTAŽO Kat. št.: NAVODILA ZA UPORABO Laserliner tester napetosti AC tive Finder Kataloška št.: 12 3
 SLO NAVODILA ZA UPORABO IN MONTAŽO Kat. št.: 12 33 32 www.conrad.si NAVODILA ZA UPORABO Laserliner tester napetosti AC tive Finder Kataloška št.: 12 33 32 KAZALO 1. FUNKCIJE / UPORABA... 3 2. VARNOSTNI
SLO NAVODILA ZA UPORABO IN MONTAŽO Kat. št.: 12 33 32 www.conrad.si NAVODILA ZA UPORABO Laserliner tester napetosti AC tive Finder Kataloška št.: 12 33 32 KAZALO 1. FUNKCIJE / UPORABA... 3 2. VARNOSTNI
DES
 Laboratorij za načrtovanje integriranih vezij Univerza v Ljubljani Fakulteta za elektrotehniko Digitalni Elektronski Sistemi Digitalni sistemi Vgrajeni digitalni sistemi Digitalni sistem: osebni računalnik
Laboratorij za načrtovanje integriranih vezij Univerza v Ljubljani Fakulteta za elektrotehniko Digitalni Elektronski Sistemi Digitalni sistemi Vgrajeni digitalni sistemi Digitalni sistem: osebni računalnik
Oblikovanje in razvijanje spletnih strani
 Uporabniški vmesnik načrtovanje in izdelava Interaktivni mediji Doc. dr. Aleš Hladnik Načrtovanje uporabniškega vmesnika (UV) Načrtovanje oz. zasnova UV (User( interface design or engineering) je načrtovanje
Uporabniški vmesnik načrtovanje in izdelava Interaktivni mediji Doc. dr. Aleš Hladnik Načrtovanje uporabniškega vmesnika (UV) Načrtovanje oz. zasnova UV (User( interface design or engineering) je načrtovanje
Člen 11(1): Frekvenčna območja Frekvenčna območja Časovna perioda obratovanja 47,0 Hz-47,5 Hz Najmanj 60 sekund 47,5 Hz-48,5 Hz Neomejeno 48,5 Hz-49,0
: Frekvenčna območja Frekvenčna območja Časovna perioda obratovanja 47,0 Hz-47,5 Hz Najmanj 60 sekund 47,5 Hz-48,5 Hz Neomejeno 48,5 Hz-49,0") Člen 11(1): Frekvenčna območja Frekvenčna območja Časovna perioda obratovanja 47,0 Hz-47,5 Hz Najmanj 60 sekund 47,5 Hz-48,5 Hz Neomejeno 48,5 Hz-49,0 Hz Neomejeno 49,0 Hz-51,0 Hz Neomejeno 51,0 Hz-51,5
Člen 11(1): Frekvenčna območja Frekvenčna območja Časovna perioda obratovanja 47,0 Hz-47,5 Hz Najmanj 60 sekund 47,5 Hz-48,5 Hz Neomejeno 48,5 Hz-49,0 Hz Neomejeno 49,0 Hz-51,0 Hz Neomejeno 51,0 Hz-51,5
7. VAJA A. ENAČBA ZBIRALNE LEČE
 7. VAJA A. ENAČBA ZBIRALNE LEČE 1. UVOD Enačbo leče dobimo navadno s pomočjo geometrijskih konstrukcij. V našem primeru bomo do te enačbe prišli eksperimentalno, z merjenjem razdalj a in b. 2. NALOGA Izračunaj
7. VAJA A. ENAČBA ZBIRALNE LEČE 1. UVOD Enačbo leče dobimo navadno s pomočjo geometrijskih konstrukcij. V našem primeru bomo do te enačbe prišli eksperimentalno, z merjenjem razdalj a in b. 2. NALOGA Izračunaj
UPS naprave Socomec Netys PL (Plug in) UPS naprava Socomec Netys PL moč: 600VA/360W; tehnologija: off-line delovanje; vhod: 1-fazni šuko 230VAC; izhod
 UPS naprava Socomec Netys PL moč: 600VA/360W; tehnologija: off-line delovanje; vhod: 1-fazni šuko 230VAC; izhod") UPS naprave Socomec Netys PL (Plug in) UPS naprava Socomec Netys PL moč: 600VA/360W; tehnologija: off-line delovanje; vhod: 1-fazni šuko 230VAC; izhod: 1-fazni 230VAC; 4 šuko vtičnica preko UPS-a; 2 šuko
UPS naprave Socomec Netys PL (Plug in) UPS naprava Socomec Netys PL moč: 600VA/360W; tehnologija: off-line delovanje; vhod: 1-fazni šuko 230VAC; izhod: 1-fazni 230VAC; 4 šuko vtičnica preko UPS-a; 2 šuko
Poročilo za 1. del seminarske naloge- igrica Kača Opis igrice Kača (Snake) je klasična igrica, pogosto prednaložena na malce starejših mobilnih telefo
 je klasična igrica, pogosto prednaložena na malce starejših mobilnih telefo") Poročilo za 1. del seminarske naloge- igrica Kača Opis igrice Kača (Snake) je klasična igrica, pogosto prednaložena na malce starejših mobilnih telefonih. Obstaja precej različic, sam pa sem sestavil meni
Poročilo za 1. del seminarske naloge- igrica Kača Opis igrice Kača (Snake) je klasična igrica, pogosto prednaložena na malce starejših mobilnih telefonih. Obstaja precej različic, sam pa sem sestavil meni
INFORMACIJSKO KOMUNIKACIJSKE TEHNOLOGIJE ŠTUDIJ INFORMACIJSKO KOMUNIKACIJSKIH TEHNOLOGIJ
 INFORMACIJSKO KOMUNIKACIJSKE TEHNOLOGIJE ŠTUDIJ INFORMACIJSKO KOMUNIKACIJSKIH TEHNOLOGIJ Border Memorial: Frontera de los Muertos, avtor John Craig Freeman, javno umetniško delo obogatene resničnosti,
INFORMACIJSKO KOMUNIKACIJSKE TEHNOLOGIJE ŠTUDIJ INFORMACIJSKO KOMUNIKACIJSKIH TEHNOLOGIJ Border Memorial: Frontera de los Muertos, avtor John Craig Freeman, javno umetniško delo obogatene resničnosti,
Microsoft Word - CNR-BTU3_Bluetooth_vmesnik
 CNR-BTU3 Bluetooth vmesnik A. Vsebina pakiranja Bluetooth USB Adapter Bluetooth programska oprema in CD z gonilniki Navodila za uporabo in CD 1. Namestitev Bluetooth programske opreme za Windowse 1. Vstavite
CNR-BTU3 Bluetooth vmesnik A. Vsebina pakiranja Bluetooth USB Adapter Bluetooth programska oprema in CD z gonilniki Navodila za uporabo in CD 1. Namestitev Bluetooth programske opreme za Windowse 1. Vstavite
Navodila za programsko opremo FeriX Namestitev na trdi disk Avtor navodil: Martin Terbuc Datum: December 2007 Center odprte kode Slovenije Spletna str
 Navodila za programsko opremo FeriX Namestitev na trdi disk Avtor navodil: Martin Terbuc Datum: December 2007 Center odprte kode Slovenije Spletna stran: http://www.coks.si/ Elektronski naslov: podpora@coks.si
Navodila za programsko opremo FeriX Namestitev na trdi disk Avtor navodil: Martin Terbuc Datum: December 2007 Center odprte kode Slovenije Spletna stran: http://www.coks.si/ Elektronski naslov: podpora@coks.si
Univerza v Ljubljani Fakulteta za elektrotehniko PREDSTAVITVENI ZBORNIK MAGISTRSKEGA ŠTUDIJSKEGA PROGRAMA II. STOPNJE ELEKTROTEHNIKA NA FAKULTETI ZA E
 PREDSTAVITVENI ZBORNIK MAGISTRSKEGA ŠTUDIJSKEGA PROGRAMA II. STOPNJE ELEKTROTEHNIKA NA FAKULTETI ZA ELEKTROTEHNIKO UNIVERZE V LJUBLJANI Ljubljana, 2019 Kazalo 1. Podatki o študijskem programu... 3 2. Temeljni
PREDSTAVITVENI ZBORNIK MAGISTRSKEGA ŠTUDIJSKEGA PROGRAMA II. STOPNJE ELEKTROTEHNIKA NA FAKULTETI ZA ELEKTROTEHNIKO UNIVERZE V LJUBLJANI Ljubljana, 2019 Kazalo 1. Podatki o študijskem programu... 3 2. Temeljni
Arial 26 pt, bold
 3 G MATEMATIKA Milan Černel Osnovna šola Brežice POUČEVANJE MATEMATIKE temeljni in zahtevnejši šolski predmet, pomembna pri razvoju celovite osebnosti učenca, prilagajanje oblik in metod poučevanja učencem
3 G MATEMATIKA Milan Černel Osnovna šola Brežice POUČEVANJE MATEMATIKE temeljni in zahtevnejši šolski predmet, pomembna pri razvoju celovite osebnosti učenca, prilagajanje oblik in metod poučevanja učencem
Chapter 1
 - 1 - Poglavje 1 Uvod v podatkovne baze - 2 - Poglavje 1 Cilji (Teme).. Nekatere domene, kjer se uporabljajo podatkovne baze Značilnosti datotečnih sistemov Problemi vezani na datotečne sisteme Pomen izraza
- 1 - Poglavje 1 Uvod v podatkovne baze - 2 - Poglavje 1 Cilji (Teme).. Nekatere domene, kjer se uporabljajo podatkovne baze Značilnosti datotečnih sistemov Problemi vezani na datotečne sisteme Pomen izraza
Uredba Komisije (EU) št. 1179/2012 z dne 10. decembra 2012 o merilih za določitev, kdaj odpadno steklo preneha biti odpadek na podlagi Direktive 2008/
 št. 1179/2012 z dne 10. decembra 2012 o merilih za določitev, kdaj odpadno steklo preneha biti odpadek na podlagi Direktive 2008/") 11.12.2012 Uradni list Evropske unije L 337/31 UREDBA KOMISIJE (EU) št. 1179/2012 z dne 10. decembra 2012 o merilih za določitev, kdaj odpadno steklo preneha biti odpadek na podlagi Direktive 2008/98/ES
11.12.2012 Uradni list Evropske unije L 337/31 UREDBA KOMISIJE (EU) št. 1179/2012 z dne 10. decembra 2012 o merilih za določitev, kdaj odpadno steklo preneha biti odpadek na podlagi Direktive 2008/98/ES
Microsoft Word - A-3-Dezelak-SLO.doc
 20. posvetovanje "KOMUNALNA ENERGETIKA / POWER ENGINEERING", Maribor, 2011 1 ANALIZA OBRATOVANJA HIDROELEKTRARNE S ŠKOLJČNIM DIAGRAMOM Klemen DEŽELAK POVZETEK V prispevku je predstavljena možnost izvedbe
20. posvetovanje "KOMUNALNA ENERGETIKA / POWER ENGINEERING", Maribor, 2011 1 ANALIZA OBRATOVANJA HIDROELEKTRARNE S ŠKOLJČNIM DIAGRAMOM Klemen DEŽELAK POVZETEK V prispevku je predstavljena možnost izvedbe
NASLOV PREDAVANJA IME IN PRIIMEK PREDAVATELJA
 Portal e-vem obstoječe stanje in nadaljnji razvoj Jernej Baranja Ana Oblak 2 Registracija s.p. v 1 dnevu (prej 7 dni) Registracija d.o.o. v 3 dneh (prej več kot 60 dni) Brezplačna registracija s.p. in
Portal e-vem obstoječe stanje in nadaljnji razvoj Jernej Baranja Ana Oblak 2 Registracija s.p. v 1 dnevu (prej 7 dni) Registracija d.o.o. v 3 dneh (prej več kot 60 dni) Brezplačna registracija s.p. in
BDV-N890W/BDV-N790W
 Sistem za domači kino s predvajalnikom Blu-ray Disc /DVD BDV-N890W BDV-N790W SI Začnite tukaj Kratka navodila za postavitev in uporabo BDV-N790W BDV-N890W 1 Vsebina embalaže/nastavitev zvočnikov BDV-N890W
Sistem za domači kino s predvajalnikom Blu-ray Disc /DVD BDV-N890W BDV-N790W SI Začnite tukaj Kratka navodila za postavitev in uporabo BDV-N790W BDV-N890W 1 Vsebina embalaže/nastavitev zvočnikov BDV-N890W
Navodila za uporabo programske opreme OTRS verzija Administracijska navodila Avtor navodil: Sebastijan Šilec Datum: December 2007 Center odprte
 Navodila za uporabo programske opreme OTRS verzija 2.2.3 Administracijska navodila Avtor navodil: Sebastijan Šilec Datum: December 2007 Center odprte kode Slovenije Spletna stran: http://www.coks.si/ Elektronski
Navodila za uporabo programske opreme OTRS verzija 2.2.3 Administracijska navodila Avtor navodil: Sebastijan Šilec Datum: December 2007 Center odprte kode Slovenije Spletna stran: http://www.coks.si/ Elektronski
Si.mobil Si.most Najkrajša pot do vaših strank. Ljubljana,
 Si.mobil Si.most Najkrajša pot do vaših strank. Ljubljana, 3. 06. 13 Si.most SMS nagradna igra SMS nagradna igra Dostop do aplikacije http://www.simost.si SMS nagradna igra Ko se logirate v aplikacijo
Si.mobil Si.most Najkrajša pot do vaših strank. Ljubljana, 3. 06. 13 Si.most SMS nagradna igra SMS nagradna igra Dostop do aplikacije http://www.simost.si SMS nagradna igra Ko se logirate v aplikacijo
1 MMK - Spletne tehnologije Vaja 5: Spletni obrazci Vaja 5 : Spletni obrazci 1. Element form Spletni obrazci so namenjeni zbiranju uporabniških podatk
 1 MMK - Spletne tehnologije Vaja 5: Spletni obrazci Vaja 5 : Spletni obrazci 1. Element form Spletni obrazci so namenjeni zbiranju uporabniških podatkov in njihov prenos med spletnimi mesti. Obrazec v
1 MMK - Spletne tehnologije Vaja 5: Spletni obrazci Vaja 5 : Spletni obrazci 1. Element form Spletni obrazci so namenjeni zbiranju uporabniških podatkov in njihov prenos med spletnimi mesti. Obrazec v
Microsoft Word - Š09 - Habjan.docx
 Robotska celica za paletizacijo leče avtomobilskega emblema Jure Habjan 1 Mentorji: Iztok Nared 2, prof. dr. Roman Kamnik 1, prof. dr. Marko Munih 1 1 Fakulteta za elektrotehniko, Univerza v Ljubljani,
Robotska celica za paletizacijo leče avtomobilskega emblema Jure Habjan 1 Mentorji: Iztok Nared 2, prof. dr. Roman Kamnik 1, prof. dr. Marko Munih 1 1 Fakulteta za elektrotehniko, Univerza v Ljubljani,
VAJE RID 1 (4), program PTI, šol
, program PTI, šol") VAJE INFORMATIKA, program PTI šol. leto 08/09 Za vsako vajo izdelajte kratka navodila oz. katere ukaze ste uporabili za izdelavo dokumenta. Vsak dokument stiskajte in ga vsatvite v delovno mapo. Pred izpitom
VAJE INFORMATIKA, program PTI šol. leto 08/09 Za vsako vajo izdelajte kratka navodila oz. katere ukaze ste uporabili za izdelavo dokumenta. Vsak dokument stiskajte in ga vsatvite v delovno mapo. Pred izpitom
ŠTUDIJSKA PROGRAMA PRVE IN DRUGE STOPNJE
 ŠTUDIJSKA PROGRAMA PRVE IN DRUGE STOPNJE Multimedija je povsod okoli nas Računalniki, tablice, pametni telefoni, ure in druge elektronske naprave so neločljivi del naših življenj. Prek njih urejamo dnevna
ŠTUDIJSKA PROGRAMA PRVE IN DRUGE STOPNJE Multimedija je povsod okoli nas Računalniki, tablice, pametni telefoni, ure in druge elektronske naprave so neločljivi del naših življenj. Prek njih urejamo dnevna
DES11_realno
 Laboratorij za načrtovanje integriranih vezij Univerza v Ljubljani Fakulteta za elektrotehniko Digitalni Elektronski Sistemi Delovanje realnega vezja Omejitve modela vezja 1 Model v VHDLu je poenostavljeno
Laboratorij za načrtovanje integriranih vezij Univerza v Ljubljani Fakulteta za elektrotehniko Digitalni Elektronski Sistemi Delovanje realnega vezja Omejitve modela vezja 1 Model v VHDLu je poenostavljeno
PowerPoint Presentation
 INFORMACIJSKI SISTEM MFERAC - LETA 2022 mag. Andreja Sladoje Jemec, Sanja Štumberger Kovačič Ministrstvo za finance 10.12.2018 Vsebina predstavitve 1. Projekt MFERAC05 in izhodišča prenove 2. Izvajanje
INFORMACIJSKI SISTEM MFERAC - LETA 2022 mag. Andreja Sladoje Jemec, Sanja Štumberger Kovačič Ministrstvo za finance 10.12.2018 Vsebina predstavitve 1. Projekt MFERAC05 in izhodišča prenove 2. Izvajanje
Fakulteta za industrijski inženiring Novo mesto STRATEGIJA Stran:1/9 STRATEGIJA FAKULTETE ZA INDUSTRIJSKI INŽENIRING NOVO MESTO No
 inženiring Novo mesto STRATEGIJA 2011-2015 Stran:1/9 STRATEGIJA FAKULTETE ZA INDUSTRIJSKI INŽENIRING NOVO MESTO 2011-2015 Novo mesto, februar 2011 inženiring Novo mesto STRATEGIJA 2011-2015 Stran:2/9 1
inženiring Novo mesto STRATEGIJA 2011-2015 Stran:1/9 STRATEGIJA FAKULTETE ZA INDUSTRIJSKI INŽENIRING NOVO MESTO 2011-2015 Novo mesto, februar 2011 inženiring Novo mesto STRATEGIJA 2011-2015 Stran:2/9 1
Navodila za uporabo Mini prenosna HD kamera s snemalnikom
 Navodila za uporabo Mini prenosna HD kamera s snemalnikom www.spyshop.eu Izdelku so priložena navodila v angleščini, ki poleg teksta prikazujejo tudi slikovni prikaz sestave in delovanja izdelka. Lastnosti
Navodila za uporabo Mini prenosna HD kamera s snemalnikom www.spyshop.eu Izdelku so priložena navodila v angleščini, ki poleg teksta prikazujejo tudi slikovni prikaz sestave in delovanja izdelka. Lastnosti
Priloga 1: Pravila za oblikovanje in uporabo standardiziranih referenc pri opravljanju plačilnih storitev Stran 4012 / Št. 34 / Uradni lis
 Priloga 1: Pravila za oblikovanje in uporabo standardiziranih referenc pri opravljanju plačilnih storitev Stran 4012 / Št. 34 / 24. 5. 2019 Uradni list Republike Slovenije PRILOGA 1 PRAVILA ZA OBLIKOVANJE
Priloga 1: Pravila za oblikovanje in uporabo standardiziranih referenc pri opravljanju plačilnih storitev Stran 4012 / Št. 34 / 24. 5. 2019 Uradni list Republike Slovenije PRILOGA 1 PRAVILA ZA OBLIKOVANJE
DES
 Laboratorij za načrtovanje integriranih vezij Univerza v Ljubljani Fakulteta za elektrotehniko Digitalni Elektronski Sistemi Model vezja Računalniški model in realno vezje Model logičnega negatorja Načini
Laboratorij za načrtovanje integriranih vezij Univerza v Ljubljani Fakulteta za elektrotehniko Digitalni Elektronski Sistemi Model vezja Računalniški model in realno vezje Model logičnega negatorja Načini
Slide 1
 Tehnike programiranja PREDAVANJE 10 Uvod v binarni svet in računalništvo (nadaljevanje) Logične operacije Ponovitev in ilustracija Logične operacije Negacija (eniški komplement) Negiramo vse bite v besedi
Tehnike programiranja PREDAVANJE 10 Uvod v binarni svet in računalništvo (nadaljevanje) Logične operacije Ponovitev in ilustracija Logične operacije Negacija (eniški komplement) Negiramo vse bite v besedi
UČNI NAČRT PREDMETA / COURSE SYLLABUS
 UČNI NAČRT PREDMETA COURSE SYLLABUS Predmet Course title INTELIGENTNI STREŽNI IN MONTAŽNI SISTEMI INTELLIGENT HANDLING AND ASSEMBLY SYSTEMS Študijski program in stopnja Study programme and level Doktorski
UČNI NAČRT PREDMETA COURSE SYLLABUS Predmet Course title INTELIGENTNI STREŽNI IN MONTAŽNI SISTEMI INTELLIGENT HANDLING AND ASSEMBLY SYSTEMS Študijski program in stopnja Study programme and level Doktorski
Univerza v Ljubljani Naravoslovnotehniška fakulteta Oddelek za tekstilstvo Sledenje pogledu (Eye tracking) Seminarska naloga pri predmetu Interaktivni
 Seminarska naloga pri predmetu Interaktivni") Univerza v Ljubljani Naravoslovnotehniška fakulteta Oddelek za tekstilstvo Sledenje pogledu (Eye tracking) Seminarska naloga pri predmetu Interaktivni mediji Smer študija: Načrtovanje tekstilij in oblačil,
Univerza v Ljubljani Naravoslovnotehniška fakulteta Oddelek za tekstilstvo Sledenje pogledu (Eye tracking) Seminarska naloga pri predmetu Interaktivni mediji Smer študija: Načrtovanje tekstilij in oblačil,
Diapozitiv 1
 9. Funkcije 1 9. 1. F U N K C I J A m a i n () 9.2. D E F I N I C I J A F U N K C I J E 9.3. S T A V E K r e t u r n 9.4. K L I C F U N K C I J E I N P R E N O S P A R A M E T R O V 9.5. P R E K R I V
9. Funkcije 1 9. 1. F U N K C I J A m a i n () 9.2. D E F I N I C I J A F U N K C I J E 9.3. S T A V E K r e t u r n 9.4. K L I C F U N K C I J E I N P R E N O S P A R A M E T R O V 9.5. P R E K R I V
REŠEVANJE DIFERENCIALNIH ENAČB Z MEHANSKIMI RAČUNSKIMI STROJI Pino Koc Seminar za učitelje matematike FMF, Ljubljana, 25. september 2015 Vir: [1] 1
![REŠEVANJE DIFERENCIALNIH ENAČB Z MEHANSKIMI RAČUNSKIMI STROJI Pino Koc Seminar za učitelje matematike FMF, Ljubljana, 25. september 2015 Vir: [1] 1](/thumbs/100/146244606.jpg "REŠEVANJE DIFERENCIALNIH ENAČB Z MEHANSKIMI RAČUNSKIMI STROJI Pino Koc Seminar za učitelje matematike FMF, Ljubljana, 25. september 2015 Vir: [1] 1") REŠEVANJE DIFERENCIALNIH ENAČB Z MEHANSKIMI RAČUNSKIMI STROJI Pino Koc Seminar za učitelje matematike FMF, Ljubljana, 25. september 2015 Vir: [1] 1 Nekateri pripomočki in naprave za računanje: 1a) Digitalni
REŠEVANJE DIFERENCIALNIH ENAČB Z MEHANSKIMI RAČUNSKIMI STROJI Pino Koc Seminar za učitelje matematike FMF, Ljubljana, 25. september 2015 Vir: [1] 1 Nekateri pripomočki in naprave za računanje: 1a) Digitalni
PowerPoint Presentation
 Prva javna predstavitve Lokacija: ETRA d.o.o., Bukovžlak 101, Celje 26.9.2017 ob 12.00 uri Podjetniški razvojni konzorcij Kompetenčni center ROBOFLEX () Dr.Brane Semolič Strokovni koordinator Vpliv eksplozivnega
Prva javna predstavitve Lokacija: ETRA d.o.o., Bukovžlak 101, Celje 26.9.2017 ob 12.00 uri Podjetniški razvojni konzorcij Kompetenčni center ROBOFLEX () Dr.Brane Semolič Strokovni koordinator Vpliv eksplozivnega
Univerza v Ljubljani FAKULTETA ZA RAČUNALNIŠTVO IN INFORMATIKO Tržaška c. 25, 1000 Ljubljana Realizacija n-bitnega polnega seštevalnika z uporabo kvan
 Univerza v Ljubljani FAKULTETA ZA RAČUNALNIŠTVO IN INFORMATIKO Tržaška c. 25, 1000 Ljubljana Realizacija n-bitnega polnega seštevalnika z uporabo kvantnih celičnih avtomatov SEMINARSKA NALOGA Univerzitetna
Univerza v Ljubljani FAKULTETA ZA RAČUNALNIŠTVO IN INFORMATIKO Tržaška c. 25, 1000 Ljubljana Realizacija n-bitnega polnega seštevalnika z uporabo kvantnih celičnih avtomatov SEMINARSKA NALOGA Univerzitetna
KRMILNA OMARICA KO-0
 KOTLOVSKA REGULACIJA Z ENIM OGREVALNIM KROGOM Siop Elektronika d.o.o., Dobro Polje 11b, 4243 Brezje, tel.: +386 4 53 09 150, fax: +386 4 53 09 151, gsm:+386 41 630 089 e-mail: info@siopelektronika.si,
KOTLOVSKA REGULACIJA Z ENIM OGREVALNIM KROGOM Siop Elektronika d.o.o., Dobro Polje 11b, 4243 Brezje, tel.: +386 4 53 09 150, fax: +386 4 53 09 151, gsm:+386 41 630 089 e-mail: info@siopelektronika.si,
Vaja 3 Kopiranje VM in namestitev aplikacij - strežnik SQL 2000 SP3a A. Lokalni strežnik Vmware ESX Dodajanje uporabnikov vajexx v skupino Vaje
 Vaja 3 Kopiranje VM in namestitev aplikacij - strežnik SQL 2000 SP3a A. Lokalni strežnik Vmware ESX 3.5 1. Dodajanje uporabnikov vajexx v skupino Vaje 2. Kopiranje Win2003 strežnika in registracija na
Vaja 3 Kopiranje VM in namestitev aplikacij - strežnik SQL 2000 SP3a A. Lokalni strežnik Vmware ESX 3.5 1. Dodajanje uporabnikov vajexx v skupino Vaje 2. Kopiranje Win2003 strežnika in registracija na
WAT24460BY PDF
 BOSCH WAT24460BY Redna cena: 642,78 Spletna cena: 487,16 Slike 1 Kratek opis Prostostoječi pralni stroj BOSCH WAT24460BY z vgrajenim tihim invertnim elektromotorjem se ponaša z odličnim energijskim razredom
BOSCH WAT24460BY Redna cena: 642,78 Spletna cena: 487,16 Slike 1 Kratek opis Prostostoječi pralni stroj BOSCH WAT24460BY z vgrajenim tihim invertnim elektromotorjem se ponaša z odličnim energijskim razredom
Serija ZT400™ Kratka navodila
 Serija ZT400 Kratka navodila S temi navodili si lahko pomagate pri vsakodnevni uporabi tiskalnika. Podrobnejša navodila poiščite v Uporabniškem priročniku. Komponente tiskalnika Slika 1 prikazuje komponente
Serija ZT400 Kratka navodila S temi navodili si lahko pomagate pri vsakodnevni uporabi tiskalnika. Podrobnejša navodila poiščite v Uporabniškem priročniku. Komponente tiskalnika Slika 1 prikazuje komponente
IR termometer testo 830 testo 830 hiter, za brezkontaktno merjenje površinske temperature Merjenje z laserskim pointerjem za natančno merjenje tudi na
 IR termometer testo 830 testo 830 hiter, za brezkontaktno merjenje površinske temperature Merjenje z laserskim pointerjem za natančno merjenje tudi na večjih razdaljah Hitro shranjevanje odčitkov (2 odčitka
IR termometer testo 830 testo 830 hiter, za brezkontaktno merjenje površinske temperature Merjenje z laserskim pointerjem za natančno merjenje tudi na večjih razdaljah Hitro shranjevanje odčitkov (2 odčitka
ŠTEVCI PROMETA IN NJIHOVA UPORABA ZA NAMENE STATISTIK ČRT GRAHONJA
 ŠTEVCI PROMETA IN NJIHOVA UPORABA ZA NAMENE STATISTIK ČRT GRAHONJA Navdih Poizvedovanje po BD podatkovnih virih, ki imajo časovno dimenzijo in so dostopni. Večji promet pomeni večje število dobrin in močnejšo
ŠTEVCI PROMETA IN NJIHOVA UPORABA ZA NAMENE STATISTIK ČRT GRAHONJA Navdih Poizvedovanje po BD podatkovnih virih, ki imajo časovno dimenzijo in so dostopni. Večji promet pomeni večje število dobrin in močnejšo
PowerPoint Presentation
 Naslov prispevka STORITVE SOC ŠT.3 ter SOC ŠT.4 Peter Šprajc, Ministrstvo za javno upravo Andrej Skamen, S&T Slovenija d.d.. 10.12.2018 AGENDA pravna podlaga za izvajanja storitev opis SOC storitve 3 opis
Naslov prispevka STORITVE SOC ŠT.3 ter SOC ŠT.4 Peter Šprajc, Ministrstvo za javno upravo Andrej Skamen, S&T Slovenija d.d.. 10.12.2018 AGENDA pravna podlaga za izvajanja storitev opis SOC storitve 3 opis
innbox_f60_navodila.indd
 Osnovna navodila Komunikacijski prehod Innbox F60 SFP AC Varnostna opozorila Pri uporabi opreme upoštevajte naslednja opozorila in varnostne ukrepe. Da bi v največji meri izkoristili najnovejšo tehnologijo
Osnovna navodila Komunikacijski prehod Innbox F60 SFP AC Varnostna opozorila Pri uporabi opreme upoštevajte naslednja opozorila in varnostne ukrepe. Da bi v največji meri izkoristili najnovejšo tehnologijo
Gimnazija Bežigrad Peričeva Ljubljana OPERACIJSKI SISTEM Predmet: informatika
 Gimnazija Bežigrad Peričeva 4 1000 Ljubljana OPERACIJSKI SISTEM Predmet: informatika KAZALO 1. Uvod...3 2. Predstavitev programa Windows 98...5 3. Raziskovanje računalnika...5 4. Raziskovanje Interneta...6
Gimnazija Bežigrad Peričeva 4 1000 Ljubljana OPERACIJSKI SISTEM Predmet: informatika KAZALO 1. Uvod...3 2. Predstavitev programa Windows 98...5 3. Raziskovanje računalnika...5 4. Raziskovanje Interneta...6
Diapozitiv 1
 Računalništvo in informatika Program: Mehatronika dr. Hubert Fröhlich, univ. dipl. el. Podatkovne baze 2 Podatkovne baze Podatki osnova za odločanje in izvajanje akcij tiskana oblika elektronska oblika
Računalništvo in informatika Program: Mehatronika dr. Hubert Fröhlich, univ. dipl. el. Podatkovne baze 2 Podatkovne baze Podatki osnova za odločanje in izvajanje akcij tiskana oblika elektronska oblika
Microsoft Word - CN-BTU4 Quick Guide_SI
 Bluetooth Dongle Artikel: CN-BTU4 NAVODILA v1.0 Sistemske zahteve Zahteve za PC: - Proc.: Intel Pentium III 500MHz or above. - Ram: 256MB ali več. - Disk: vsaj 50MB. - OS: Windows 98SE/Me/2000/XP - Prost
Bluetooth Dongle Artikel: CN-BTU4 NAVODILA v1.0 Sistemske zahteve Zahteve za PC: - Proc.: Intel Pentium III 500MHz or above. - Ram: 256MB ali več. - Disk: vsaj 50MB. - OS: Windows 98SE/Me/2000/XP - Prost
FIZIKA IN ARHITEKTURA SKOZI NAŠA UŠESA
 FIZIKA IN ARHITEKTURA SKOZI NAŠA UŠESA SE SPOMNITE SREDNJEŠOLSKE FIZIKE IN BIOLOGIJE? Saša Galonja univ. dipl. inž. arh. ZAPS marec, april 2012 Vsebina Kaj je zvok? Kako slišimo? Arhitekturna akustika
FIZIKA IN ARHITEKTURA SKOZI NAŠA UŠESA SE SPOMNITE SREDNJEŠOLSKE FIZIKE IN BIOLOGIJE? Saša Galonja univ. dipl. inž. arh. ZAPS marec, april 2012 Vsebina Kaj je zvok? Kako slišimo? Arhitekturna akustika
PowerPoint Presentation
 Poslovni analitik v agilnem svetu Prenova spletne strani Uvedba podpore za mobilne naprave Ineor d.o.o. O meni poslovni analitik izkušnje s tehnologijo (programiranje, razhroščevanje, inštalacije, administracija,...)
Poslovni analitik v agilnem svetu Prenova spletne strani Uvedba podpore za mobilne naprave Ineor d.o.o. O meni poslovni analitik izkušnje s tehnologijo (programiranje, razhroščevanje, inštalacije, administracija,...)
SLO - NAVODILO ZA NAMESTITEV IN UPORABO Št. izd. : HD AKCIJSKA KAMERA MIDLAND XTREME XTC 200 Št. izdelka:
 SLO - NAVODILO ZA NAMESTITEV IN UPORABO Št. izd. : 860750 www.conrad.si HD AKCIJSKA KAMERA MIDLAND XTREME XTC 200 Št. izdelka: 860750 1 AKCIJSKA KAMERA XTC 200 Zahvaljujemo se vam za nakup akcijske kamere
SLO - NAVODILO ZA NAMESTITEV IN UPORABO Št. izd. : 860750 www.conrad.si HD AKCIJSKA KAMERA MIDLAND XTREME XTC 200 Št. izdelka: 860750 1 AKCIJSKA KAMERA XTC 200 Zahvaljujemo se vam za nakup akcijske kamere
DCS-2330L_A1_QIG_v1.00(EU).indd
.indd") HD WIRELESS N OUTDOOR CLOUD CAMERA DCS-2330L KRATKA NAVODILA ZA UPORABO VSEBINA PAKETA HD WIRELESS N OUTDOOR CLOUD CAMERA DCS-2330L NAPAJALNI ADAPTER ADAPTER ETHERNET KABEL (CAT5 UTP) MED POSTAVITVIJO,
HD WIRELESS N OUTDOOR CLOUD CAMERA DCS-2330L KRATKA NAVODILA ZA UPORABO VSEBINA PAKETA HD WIRELESS N OUTDOOR CLOUD CAMERA DCS-2330L NAPAJALNI ADAPTER ADAPTER ETHERNET KABEL (CAT5 UTP) MED POSTAVITVIJO,
Prevodnik_v_polju_14_
 14. Prevodnik v električnem polju Vsebina poglavja: prevodnik v zunanjem električnem polju, površina prevodnika je ekvipotencialna ploskev, elektrostatična indukcija (influenca), polje znotraj votline
14. Prevodnik v električnem polju Vsebina poglavja: prevodnik v zunanjem električnem polju, površina prevodnika je ekvipotencialna ploskev, elektrostatična indukcija (influenca), polje znotraj votline
an-01-sl-Temperaturni_zapisovalnik_podatkov_Tempmate.-S1.docx
 SLO - NAVODILA ZA UPORABO IN MONTAŽO Kat. št.: 14 24 835 www.conrad.si NAVODILA ZA UPORABO Temperaturni zapisovalnik podatkov Tempmate. S1 Kataloška št.: 14 24 835 KAZALO 1. OPIS PROGRAMSKE OPREME ZA NAPRAVO...
SLO - NAVODILA ZA UPORABO IN MONTAŽO Kat. št.: 14 24 835 www.conrad.si NAVODILA ZA UPORABO Temperaturni zapisovalnik podatkov Tempmate. S1 Kataloška št.: 14 24 835 KAZALO 1. OPIS PROGRAMSKE OPREME ZA NAPRAVO...
Sistemi Daljinskega Vodenja Vaja 1 Matej Kristan Laboratorij za Strojni Vid Fakulteta za elektrotehniko, Univerza v Ljubljani
 Sistemi Daljinskega Vodenja Vaja 1 Matej Kristan Laboratorij za Strojni Vid Fakulteta za elektrotehniko, Univerza v Ljubljani matej.kristan@fe.uni-lj.si Sistemi Daljinskega Vodenja Ime: Matej Kristan Docent
Sistemi Daljinskega Vodenja Vaja 1 Matej Kristan Laboratorij za Strojni Vid Fakulteta za elektrotehniko, Univerza v Ljubljani matej.kristan@fe.uni-lj.si Sistemi Daljinskega Vodenja Ime: Matej Kristan Docent
PowerPoint Presentation
 Predstavitev učinkovitega upravljanja z energijo in primeri dobrih praks v javnih stavbah Nova Gorica, 23.1.2019 Projekt CitiEnGov Tomaž Lozej, GOLEA Nova Gorica Energetski manager Agencija GOLEA opravlja
Predstavitev učinkovitega upravljanja z energijo in primeri dobrih praks v javnih stavbah Nova Gorica, 23.1.2019 Projekt CitiEnGov Tomaž Lozej, GOLEA Nova Gorica Energetski manager Agencija GOLEA opravlja
INFORMATIKA TEČAJ ZA VIŠJEGA GASILCA
 INFORMATIKA TEČAJ ZA VIŠJEGA GASILCA Damjan Munda, GČ, II.st. VSEBINA PREDMETA INFORMACIJSKI SISTEMI SISTEM OSEBNIH GESEL IN HIERARHIJA PRISTOJNOSTI GASILSKI INFORMACIJSKI SISTEM KAJ JE INFORMATIKA? Informatika
INFORMATIKA TEČAJ ZA VIŠJEGA GASILCA Damjan Munda, GČ, II.st. VSEBINA PREDMETA INFORMACIJSKI SISTEMI SISTEM OSEBNIH GESEL IN HIERARHIJA PRISTOJNOSTI GASILSKI INFORMACIJSKI SISTEM KAJ JE INFORMATIKA? Informatika